自動車安全運転シンポジウム2019「自動運転社会の展望」レポート
自動車安全運転センター主催「自動車安全運転シンポジウム2019」が開催された(後援:警察庁)。今年のテーマは「自動運転社会の展望-レベル3時代の到来と運転者の役割」だ。
この記事をシェア
自動車安全運転シンポジウムは、今後の交通安全対策に有益な情報を提供することを目的として、年1回のペースで開催されている。
今回は、「自動運転社会の展望-レベル3時代の到来と運転車の役割」というテーマが取り上げられた。2020年に高速道路で運転自動化レベル3(※1)や地域を限定したレベル4の移動サービス(無人自動運転バスによる公共交通)の実現が政府目標として掲げられているからだ。
※1 運転自動化レベル:クルマの自動運転のレベルを6段階で示したもので、レベル3から決められた条件内での自動運転が可能になる。ただし、レベル3は、運転者が常に車両からの交代要求に備えておく必要がある。レベル4は決められた条件内であれば交代要求はない。
今回の講演内容は、特別講演が2本と一般講演が3本。タイトルと講演者は以下の通りだ。
【特別講演】
●自動運転の社会実装に向けた政府・企業・研究機関の取り組み:東京大学・須田義大(すだ・よしひろ)教授
●自動運転社会の実現に向けた検討状況の国際比較:モータージャーナリスト・清水和夫氏
【一般講演】
●自動運転の実現に向けた日本自動車工業会の取り組み:日本自動車工業会・横山利夫主査
●自動運転の実現に向けた国土交通省の取り組み:国土交通省自動車局自動運転戦略室・平澤崇裕(ひらさわ・たかひろ)室長
●自動運転の実現に向けた警察のとりく~道路交通法の改正を踏まえて:警察庁長官官房(高度道路交通政策担当)・堀内尚(ほりうち・ひさし)参事官
特別講演その1:運転自動化レベルの定義などについて
特別講演の1本目「自動運転の社会実装に向けた政府・企業・研究機関の取り組み」を担当した須田義大氏は、東京大学生産技術研究所・次世代モビリティ研究センター(ITSセンター)に所属し、さらに同大学モビリティ・イノベーション連携研究機構長も務める。日本の次世代モビリティ研究の第一人者である須田氏は、政府・企業・研究機関などの動向を紹介した。
中でもここ数年で重要だったのが、運転自動化レベルの定義(画像1)の制定だ。内閣官房の高度情報通信ネットワーク社会推進戦略本部(IT総合戦略室)・官民データ活用推進戦略会議では、2015年から毎年「官民ITS構想・ロードマップ」を発表しており、画像1はその2019年版に掲載されたものだ。
この定義には、米国の非営利団体SAE International(※2)が2016年9月に発表した「J3016」を日本語訳した「自動車用運転自動化システムのレベル分類及び定義」(公益社団法人 自動車技術会が2018年2月に発表)が採用されている。運転自動化レベルの定義は、世界的にこのSAE Internationalの「J3016」が基準となっている。
※2 SAE International:モビリティ関連の研究者やエンジニアらが所属する米国の非営利団体
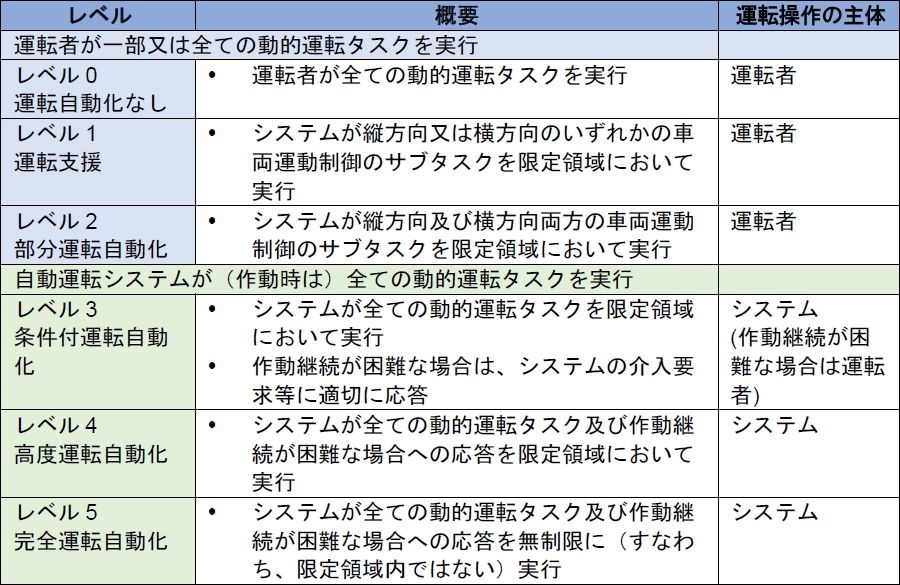
画像1。運転自動化レベルの定義。「官民ITS構想・ロードマップ 2019」より。
また自身が外部取締役として関わる、東大・生産研発のベンチャー企業である先進モビリティ株式会社が関わる自動運転バスの営業運行実証実験なども紹介された。11月1日からスタートし、2020年3月31日までの5か月間にわたり、つくばエクスプレス・柏の葉キャンパス駅と東大柏キャンパス間を結ぶ公道を用いた実証実験だ。
特別講演その2:海外ではレベルにこだわらない運転自動化技術の実装が進む
特別講演の2本目「自動運転社会の実現に向けた検討状況の国際比較」を担当したのは、モータージャーナリストの清水和夫氏。海外の自動車メーカーの中で、ドイツ勢を中心とした運転自動化技術が紹介された。それによると、ドイツ勢は運転自動化レベルにこだわらず、レベル2の安全運転支援の範疇でも可能なことを実装していく流れもあるという。社会への実装という大きな課題にソフトランディングさせる手法を、清水氏は「自動運転2.0」という表現で紹介していた。
そして、レベル3はメーカー各社が激しい競争でしのぎを削っている状態であるが、レベル4以上は各社が協調していくべき領域だとも語った。独自の見解として、レベル4のグループ分けの一覧が紹介された(画像2)。

画像2。レベル4のグループ分け。清水氏の調査によるもの。
【グループ分け詳細】
最上段:トヨタグループ(トヨタ、ダイハツ、スバル、スズキ、マツダ、日野)
2段目:フォルクスワーゲン(VW)グループ(VW、アウディ、ポルシェ、ベントレー、セアト、シュコダ)+フォード
3段目:メルセデス・ベンツ+BMW+ジャガー・ランドローバー(印タタ傘下)+三菱ふそう(ダイムラーグループ)+ボッシュ
4段目(左):クルーズ(GMの自動運転部門)+ホンダ
4段目(右):FCA(FIATとクライスラー)+グループPSA(プジョーとシトロエン)+グーグル
5段目:ルノー+日産+三菱
そのほか:テスラとボルボはまだ動向が不確定
→ 次ページ:
続いては一般講演のレポート!
一般講演その1:自動運転の安全性を証明するための手法の確率など、自工会の取り組み
一般講演その1は、日本自動車工業会(自工会)の横山利夫主査による、「自動運転の実現に向けた日本自動車工業会の取り組み」だ。自動運転に関する自工会の体制と国内外の連携などが解説された(画像3)。
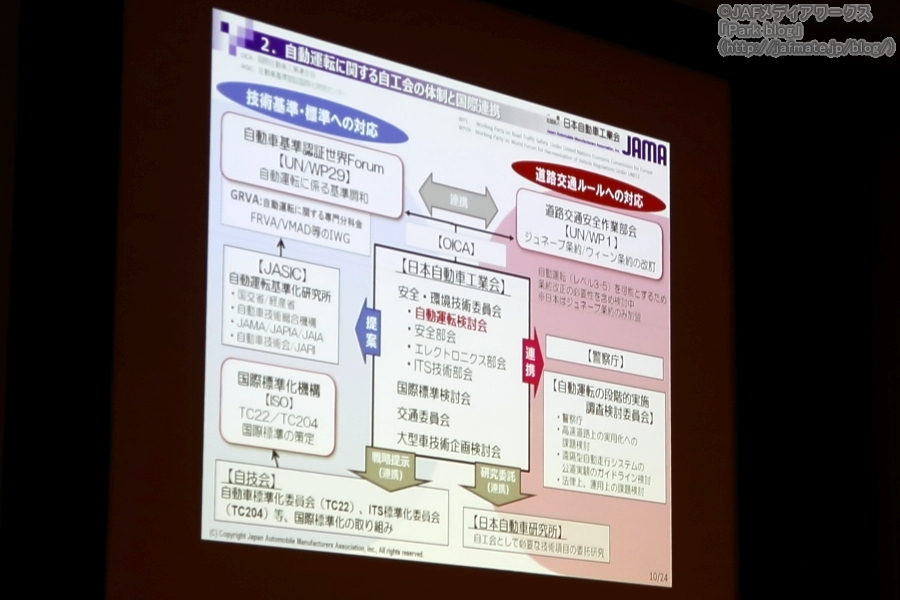
画像3。自動運転に関する自工会の体制と国際連携。
自工会の運転自動化に冠しての活動は、安全・環境技術委員会の中に自動運転検討会で行われている。同検討会の傘下には、自動運転に関する以下の6つのワーキングループ(WG)がある(画像4)。
●ユースケース(※3)WG
●Human Factor(ヒューマンファクター)WG
●AD(※4)安全性評価WG
●DSSAD(※5)対応WG
●道交法対応WG
●AD法規対応WG
※3 ユースケース(UC):自動運転シーンを具体的に記述したもの
※4 AD:Automated Drivingの略。自動運転のこと
※5 DSSAD:Data Storage System for Automated Drivingの略。自動運転のためのデータ保存システムのこと
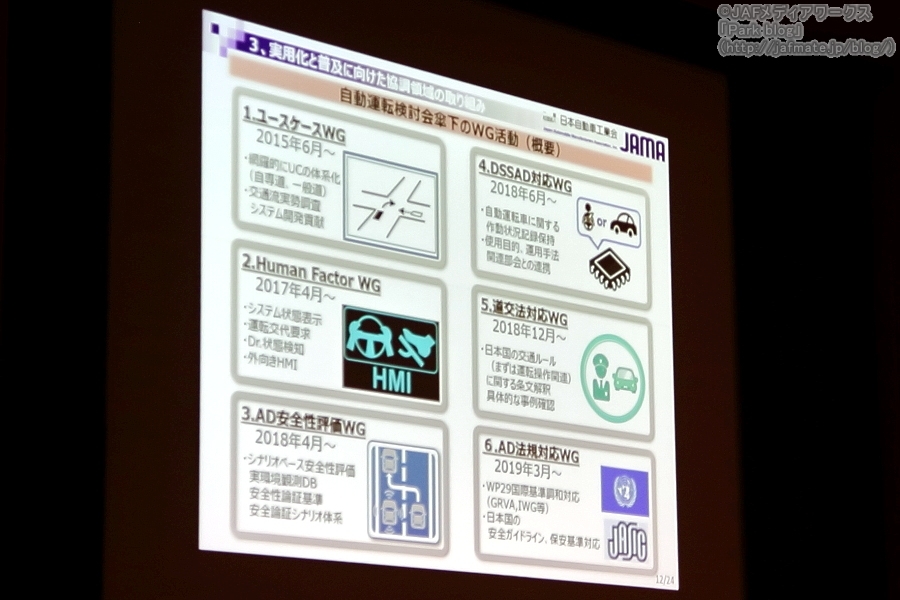
画像4。自工会の安全・環境技術委員会内の自動運転検討会参加の6つのWGとその活動内容。
WGの中で大きく取り上げられたのが、「AD安全性評価WG」(画像4の3)。その背景として、自動運転システムの安全性を適切に証明するための方法論の策定が、自工会として重要課題としていることがある。
現在、自動運転システムの安全性評価の国際的なトレンドとなっているのが「シナリオベース手法」だ(画像5)。シナリオベース手法とは、他車の割り込みや急制動などのシーンを時系列的に再現して評価する手法のことである。同手法の検証・確立に向け、オールジャパン体制の研究開発が進められているとした。そしてシナリオ生成プロセスを国際標準化、テストシナリオを国際基準調和で提案するとしている。
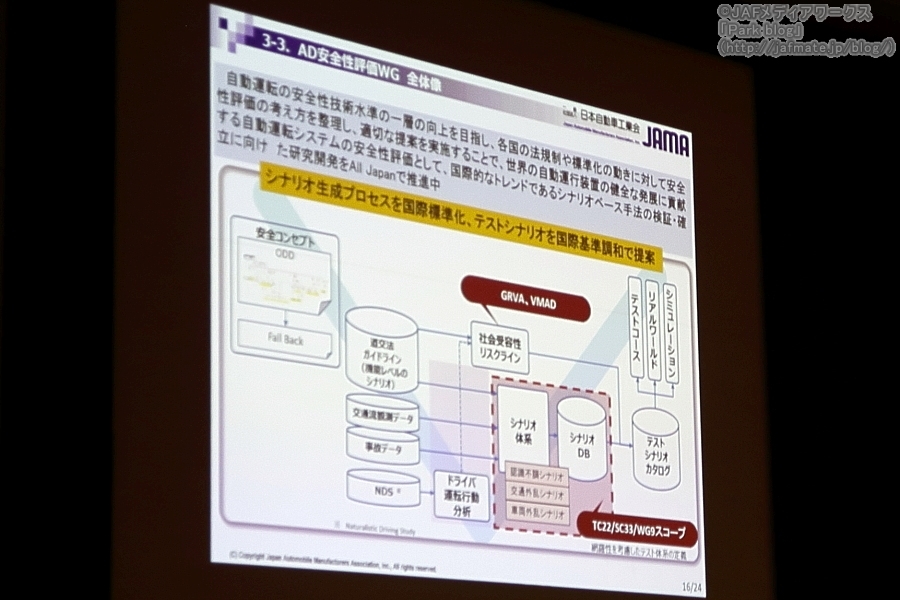
画像5。自動運転システムの安全性評価のシナリオベース手法におけるシナリオ生成プロセスのチャート。
【画像中の略語】
ODD:Operational Design Domainの略。自動運転が実現できる条件としての「運行設計領域」
GRVA:Groupe de Rapporteurs pour les Véhicules Autonomesの略。自動車基準認証世界フォーラム「UN/WP29」傘下の自動運転に関する専門分科会のこと
VMAD:Validation Method for Automated Drivingの略。GRVA傘下の自動運転認証IWGのこと(IWGとは非公式ワーキンググループのこと)
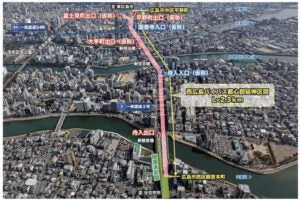
そして2020年夏前に、SIP(戦略的イノベーション創造プログラム)「自動運転(システムとサービスの実用化)」と連動し、大規模な実証実験を計画していることも伝えられた。羽田空港周辺の一般道および都心部で計画している自動運転バスの運転自動化レベル2~4の実験、そして羽田空港とお台場地区および都心を結ぶ高速道路においての実験、お台場地区の一般道におけるレベル4実証実験の3つとなっている。
一般講演その2:道路運送車両法の改正など、国交相の取り組み
国土交通省自動車局自動運転戦略室の平澤崇裕室長は、「自動運転の実現に向けた国土交通省の取り組みについて」と題した講演を行った。
現在は、運転自動化レベル3のクルマが公道で自動運転による走行を行うことはできない。ただし法律の改正が進められており、2019年3月8日に「道路運送車両法の一部を改正する法律案」が閣議決定され、同年5月24日には公布された。法案は大別して5つあるが、そのうち自動運転に直接関わるものの概要は以下の通りだ。施行日は、1と2が公布から1年以内、3が1年6か月以内であるとした。
1.保安基準対象装置への自動運行装置の追加
2.分解整備の範囲の拡大および点検整備に必要な技術情報の提供の義務付け(新たに対象となる装置として、カメラやレーダーなどがある)
3.自動運行装置などに組み込まれたプログラムの改変による改造などに係る許可制度の創設など
さらに、自動運転車が自動運転中に事故を起こした際の損害賠償責任については、2018年3月に「自動運転における損害賠償責任に関する研究会」にて、運行供用者責任の維持などの方針が公表された。つまり、事故が起きた場合、ドライバーがこれまで通り責任を負う、ということである。ただし、自動運転システムに明確な不具合があった場合はまた別となる。そして現在は、保険会社などから自動車メーカーなどに対する求償に資する記録装置や原因究明の在り方についての検討が進められているとした。
一般講演その3:道路交通法の改正など、警察の取り組み
警察庁長官官房の堀内尚参事官(高度道路交通政策担当)による「自動運転の実現に向けた警察の取り組み~道路交通法の改正を踏まえて」。同講演では、警察庁の具体的な取り組みとして、大別して次の5つが挙げられた。
(1)公道実証実験の環境整備
(2)交通ルールの法制度整備(道路交通法の改正)
(3)安全の確保(過信・過信対策)
(4)交通規制情報の公開
(5)自動運転社会に向けた研究開発
本稿では、この中から(2)交通ルールの法制度整備、つまり道交法の改正について取り上げる。
なぜ改正が必要なのかというと、従来の道交法(昭和35年法律第105号)は運転自動化レベル3以上の自動運転システムを想定していないからだ。
道交法の改正では、「携帯電話使用など禁止規定の適用除外」についても取り上げられた。レベル3での自動運転中であれば操縦(運転操作)の主体は自動運転システムとなるため、ドライバーは、自動運転システムが何らかの理由で運転操作を続けられなくなった場合に直ちに引き継げることを条件に、携帯電話を使うことができる。
一方、レベル4の自動運転に関する交通ルールの法制度は現時点では未整備だとした。レベル4の定義では、予め決められた条件内であれば、運転操作の主体は完全に自動運転システムとなり、運転操作を引き継ぐ必要もない。しかし、運行形態、車両などの安全基準、安全性の確認方法などが具体的に定まっていないため、現時点では交通ルールを法律で一律に規定することが不適当と判断したからだという。一律に規定を設けた場合、事業や技術の発展を阻害する恐れがあるとの意見も少なくない。
このように、技術面だけでなく、道交法など法律面でも必要な改正が準備されるなど、運転自動化レベル3のための環境が整いつつある。一方で、移動サービス(公共交通)のレベル4も、2020年には無人自動運転バスが公道を走行する予定だ。今後の動向から目が離せない。