世界初の遠隔自動運転の実証実験、福井永平寺町でスタート
1人の遠隔ドライバーが2台の自動運転車を遠隔監視。 産業技術総合研究所が、 福井県永平寺町で世界で初の実証実験を開始した。
この記事をシェア

「ラストマイル自動走行の実証評価(永平寺町)」にて使用されている自動運転車の1台。ヤマハの4人乗りゴルフカーをベースに公道走行が可能なように改良され、軽自動車としてナンバーが取得されている。画像提供:産業技術総合研究所
産業技術総合研究所(産総研)は、経済産業省および国土交通省の2018年度「高度な自動走行システムの社会実装に向けた研究開発・実証事業:専用空間における自動走行などを活用した端末交通システムの社会実装に向けた実証」の幹事機関を担当している。そして現在、以下の4か所で自動運転の実証実験を実施中だ(別記事『産総研による自動運転の実証実験第4弾、今度は小型バスタイプを用いて日立市で10月下旬に実施』に詳報)。
・石川県輪島市(市街地モデル)
・福井県永平寺町(過疎地モデル)
・沖縄県北谷町(観光地モデル)
・茨城県日立市(小型バスモデル)
4か所のうちのひとつである福井県吉田郡永平寺町においては、2018年3月から運転自動化レベル4相当の機能を有した車両(※1)を用いて、ラストマイルモビリティーの社会実験「ラストマイル自動走行の実証評価(永平寺町)」を断続的に実施中である。
そして11月19日から新たにスタートしたのが、1名の「遠隔ドライバー」が2台の自動運転車を遠隔監視・操作するという世界初の試みだ(以下、「1名2台遠隔自動運転」)。遠隔自動運転とは車両にドライバーが乗車せず(※2)、車両外に遠隔ドライバーが存在し、監視や非常時の運転などを行える自動運転システムのことだ。
※1 運転自動化レベル4:自動運転を実現するための技術レベルのこと。国際的に0~5までの6段階に分類されることが多く、レベル4は「自動運転システムがすべての運転タスクを限定領域内において実施し、システムの作動継続が困難な場合、利用者が応答することは期待されないもの」と定義されている(ここでの「領域」は、必ずしも地理的な領域に限らず、環境、交通状況、速度、時間的な条件などが含まれる)。
※2 現在の道路交通法上の関係から、今回の実験では車両は運転自動化レベル4だが、非常時に備えて実際にはドライバーも乗車しており、運転自動化レベル2の実験として行われている。レベル2とは、運転の主体がドライバーにあり、システムはあくまで運転支援に限られるレベルとなる。現在、日本の公道でレベル3やレベル4の技術の実証実験を行う場合は、ドライバーが乗り込み、あくまでもドライバーの責任において運行することで実験が認められている。
永平寺町で行われている実証実験はどんな内容?
永平寺町の実験では、実証環境の特徴から「過疎地モデル」と分類されており、少子高齢化地域の活性化を目指している。高齢者、通勤・通学者、観光客の移動手段としてのラストマイルモビリティーの運用を、歩行者などとの共存空間における自動走行や遠隔監視・操作の技術で実現できるかを試す。
同実験でのコースは、京福電気鉄道永平寺線の廃線跡地の町道(自転車および歩行者専用道)である「永平寺参ろーど」だ。同県東古市のえちぜん鉄道勝山永平寺線の永平寺口駅から志比(門前)までの約6kmがコースとなっている。これまでは1名の遠隔ドライバーが1台の自動運転車を運用する遠隔型自動運転の実証実験が断続的に行われてきた。そして10月29日からは約1か月間の長期実証実験を実施中だ。この長期実証の一環として、11月19日からスタートしたのが「1名2台遠隔自動運転」だ。
ちなみに永平寺町の実験では、将来、実際に正式サービス化した際の事業者についても考慮されており、えい坊くんのまちづくり株式会社と京福バス株式会社が選定された。両者が自動運転車を定期ダイヤで運行し、移動サービスのニーズや社会受容性の調査を行うと同時に、自動運転の安全性や運用性の確認が進められている。

6人乗りタイプの自動運転車。こちらもヤマハ製ゴルフカーがベースだ。こちらのナンバーは普通車。今回の「1名2台遠隔自動運転」は、軽自動車ナンバーの4人乗りタイプと、この6人乗りタイプの2台が用いられる。画像提供:産業技術総合研究所
ヤマハ製ゴルフカーの公道仕様をさらに遠隔仕様に改造

4人乗りタイプの降雨時の様子。広い開口部から雨が車内に侵入しないようビニールのカバーが取り付けられるようになっている。
ヤマハ製ゴルフカーは、路面に埋め込んだ電磁誘導線を利用することで、それに沿った自動走行が可能な自動操舵機能を有している。それを公道走行が可能なように改造してナンバーを取得した車両が用いられている。今回の「1名2台遠隔自動運転」を実施するにあたり、さらに産総研が遠隔自動運転機能を追加。車両には4名タイプと6名タイプの2種類があり、「1名2台遠隔自動運転」はこの2台を用いて実験が行われる。
機能としては自動操舵機能のほか、走路に埋め込まれたRFIDタグによる速度制御や位置補正機能、ステレオビジョンやレーザーレンジファインダーによる障害物検知と自動ブレーキ機能、車内外のカメラと車内のマイクによる遠隔でのモニター機能などを有している。遠隔での車両状態や位置の把握、運転操作を可能とする遠隔監視・操作システムは、慶応大湘南藤沢キャンパス研究所(※3)によって開発された。
※3 慶応大湘南藤沢キャンパス研究所:通称、慶応大SFC研。所長は慶応大環境情報学部の田中浩也教授が務める。多数の研究が行われており、自動運転を含めたモビリティも扱っている分野のひとつ。
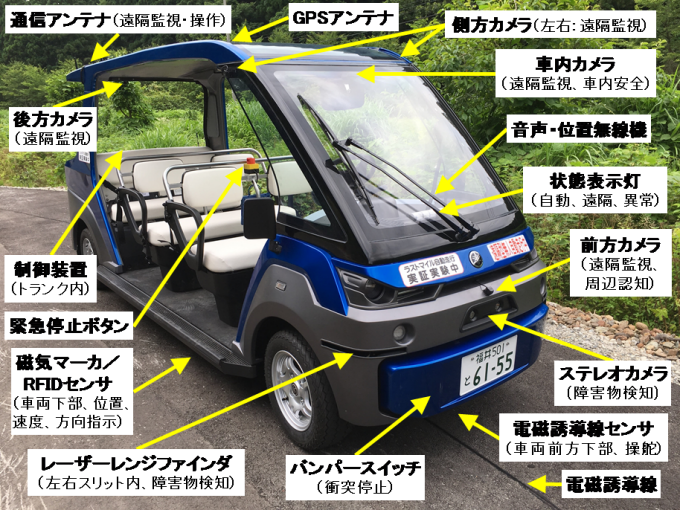
6人乗りタイプに装備されている搭載センサーなど。現状、自動運転を安全・確実に行うためには車両へ多数のセンサーを搭載する必要があり、これだけの装備が必要となる。画像提供:産業技術総合研究所
→ 次ページ:
今回のコースや実験内容について!
「1名2台遠隔自動運転」のコースは永平寺参ろーどの南側約2km
「1名2台遠隔自動運転」では、約6kmの永平寺参ろーどのうち、南側の一部区間である荒谷から志比までの約2kmで行われている。遠隔監視・操作装置などが設置されているのは、志比浄化センター内だ。また今回の実証実験では、歩行者および自転車などほかの道路利用者の通行を規制することなく、実環境の中で行われている。
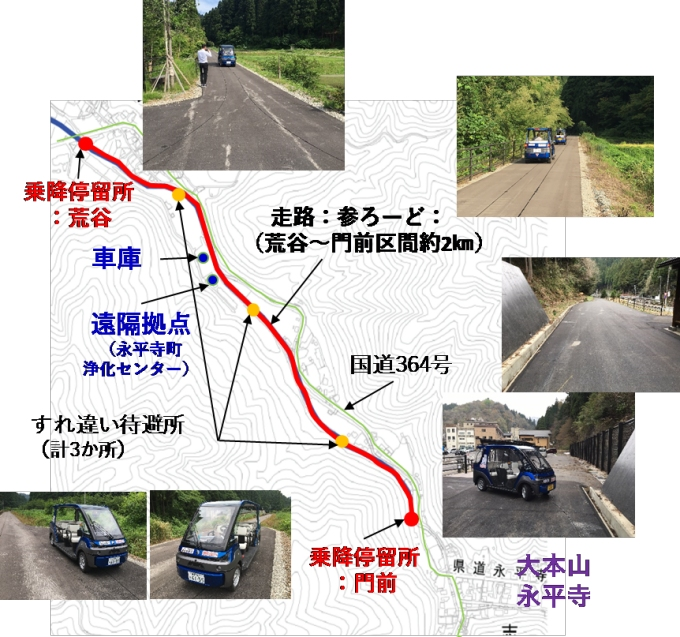
1名2台遠隔自動運転の走行ルート(赤)。自動運転のコースは約6kmだが、その南側の一部区間である荒谷から志比までの約2kmが使われる。すれ違い待避所は、3か所ある。遠隔拠点は、志比浄化センター内に設けられた。画像提供:産業技術総合研究所
遠隔ドライバー1名が2台を操作する仕組み

志比浄化センター内に設置された、1名2台遠隔自動運転の操作の様子。モニターが3台あるうちの左の2台が、それぞれ自動運転車のカメラの映像などを表示している遠隔監視・操作装置のモニター。右のモニターでは、コース全体の2台の位置などを監視している。画像提供:産業技術総合研究所
「1名2台遠隔自動運転」での運用では、警察庁が策定した「1名の遠隔監視・操作者(※4)が複数台の実験車両を走行させる場合の審査の基準」に沿って産総研が構築した、遠隔型自動運転システムが用いられている。
※4 操作者:当記事中では遠隔ドライバーと表現した
具体的な作業としては、遠隔ドライバーは1名が遠隔監視・操作装置およびメインコントローラー前に着座し、常時2台の状況監視を行う。通常は、停留所での乗降と発進の確認ボタンを操作している。
もし緊急事態が生じて1台を遠隔操作する必要性が生じたときは、残りの1台の監視・操作が困難になることから、残りの1台は自動的に安全に停車させるルールだ。その後、遠隔ドライバーが操作していた1台が自動運転に復帰した場合は、停車中だった残りの1台も同時に再発進する。また、もうひとりの遠隔ドライバーが遠隔監視・操作を行えるようになった場合も、その時点で残りの1台がすみやかに再発進できる機能が備えられている。
緊急車両のサイレンに対しては注意喚起機能を用意
遠隔ドライバーは、すべての自動運転車の周囲および走行する方向の状況を確認するため、映像および音声を同時に監視する必要がある。音声については緊急車両のサイレン音を検知することが可能で、遠隔ドライバーがどの車両で検知しているのか注意喚起する機能も付加されている。
また「1名2台遠隔自動運転」でのコースは狭いことから、あらかじめ3か所にすれ違い待避所が設置された。すれ違い待避所では1台が自動的に通過する一方で、もう1台は自動的に待避して停車して待つ。そして衝突の心配がなくなったら、待避していた1台の待機解除発進が行われる。これらの操作は、日立製作所が開発した管制システムによって運用されている。

(左)すれ違い待避所の様子。左の6人乗りタイプが、右の4人乗りタイプを先に通過させたところ。(右)2台が近距離でランデブー走行している様子。このように、安全にすれ違えるだけの幅員がない。どちらの画像の路面にも写っているラインは、電磁誘導線。これに沿って走行する。画像提供:産業技術総合研究所
産総研は、今回の「1名2台遠隔自動運転」も含めた一連の実証実験により、評価を通じてラストマイルモビリティーの社会実装が加速され、ドライバー不足やコスト削減、需要への柔軟な対応、安全性のさらなる向上など、地域の活性化に資する安心・安全な交通手段の確保や、沿道施設の利用促進などが期待されるとしている。