【CES特集】日産はNASAの技術を自動運転用にフィードバック!
この記事をシェア

「リーフ」をベースにした、「ニッサン・インテリジェント・モビリティ」の実験車両。
日産は1月6日、世界最大の家電見本市CES2017(1/5~8、米ネバダ州ラス・ベガスで開催)において、会長兼最高経営責任者のカルロス・ゴーン氏による基調講演を実施し、「ニッサン・インテリジェント・モビリティ(NIM)」の活動における成果を発表した。
同社は「ゼロ・エミッション(排出ゼロ)」および「ゼロ・フェイタリティ(交通事故死者ゼロ)」の達成を最終目標として掲げており、NIMを通じてその達成を目指していくとしている。

日産・会長兼CEOのカルロス・ゴーン氏(左側)。
NIMは、具体的にはクルマがエネルギーをどのように使い、どのように走り、そして社会とどのようにつながっていくのかというコンセプト。「ニッサン・インテリジェント・ドライビング(NID)」、「ニッサン・インテリジェント・パワー(NIP)」、「ニッサン・インテリジェント・インテグレーション(NII)」の3つの領域から構成される。
今回は自動運転の新技術や予定中の実証実験など5つを発表
そして今回、具体的に発表された内容が、以下の5点だ。
ひとつ目は、NASAの技術をベースに同社が開発した、「シームレス・オートノマス・モビリティ(SAM)」について。より多くの自動運転車が、事故現場などに遭遇してもスムーズに走行するためのAIと人が協働する仕組みだ。同社は、これを「究極のNII」と位置づける。
ふたつ目は、同社の電気自動車「リーフ」の次期モデルに、同社の自動運転技術「プロパイロット」を搭載するというもの。こちらは、「NIPの次の1章」としている。
3つ目は、「NIDの今後」として、自動運転車(無人運転)の開発を目的とした実証実験を、日本の国家戦略特区においてDeNAと共に2017年中に実施し、自動運転技術の開発を集中的に取り組んでいくというもの。
4つ目は「NIDのイノベーション」ということで、ルノー・日産アライアンスが、マイクロソフトとの提携に基づき、先進的なコネクテッド・カーの開発と実用化を加速させるとした。
5つ目は、NIM全般にかかわることとして、自動運転、電気自動車、モビリティ・サービスの普及を支援するため、自動車メーカーとしては初めて、ロックフェラー財団が手がける「100レジリエンス都市プロジェクト」のパートナーになるということを発表した。
この5点の内、今回はSAMについて詳しく紹介する。
現在のAIが抱える自動運転の課題とは?
SAMは、同社以外のクルマも含めたすべての自動運転車が、事故、路上の障害など不測の事態に直面した際でも、クルマを安全に誘導できる手段を提供するというコンセプトのシステムだ。
現状、完全な自動運転を実現するための課題となっているのが、現在のAIでは不測の事態が起きた際に判断ができないということである。

自動運転を実現するためにはまだまだクリアすべき課題がある。
日産が着目したのはNASAの技術!
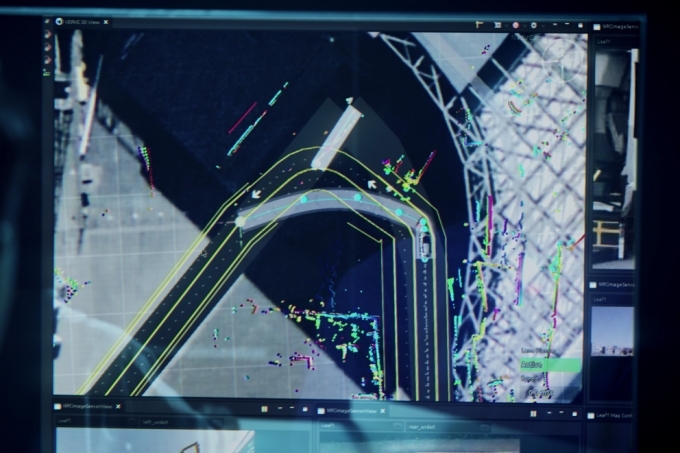
そこで日産が注目したのが、さらに難しい状況下での車両型探査ロボット=ローバーの操縦・マネジメントのためにNASAが開発した「VERVE」技術だ。
NASAは現在、「キュリオシティ」など、複数台のローバーを火星に送り込んでいる。しかし、宇宙はかくも広く、太陽系で隣の惑星である火星であっても距離があり、ローバーのリアルタイムの操縦は不可能である。
地球と火星がどれぐらい離れているかというと、2003年8月のように最も近づいたとしても5570万kmという具合で、最も離れる時は1億km以上(2027年2月には1億142万km)なので、光の速度でも片道で3分少々から5分半以上かかる。
ローバーからの映像が届いて地球の操縦者が判断して指令を送るとすると、往復するわけで確実に5分以上はかかってしまう。よって、もし前方にあと4分で到達する距離のところに突然巨大なクレバスが現れた、などといった緊急事態が起きた時にはもう間に合わない。
そこで、そうした予測不可能な要素だらけの未知の環境下においてローバー自身に判断させ(自動運転)、その動作を視覚化して監視・運用するために開発されたのが、VERVEというわけだ。
VERVEは、ローバーが障害を避けて安全に走行できるように経路を算出する。そして、もしAIによる判断が困難な地形が現れたときは、停車してNASAの管理者に判断を仰ぐ。そして管理者が望ましいルートを作成してローバーに指示することで、走行が再開するのである。
そんな仕組みを持ったVERVEをベースにして開発されたのが、SAMというわけだ。
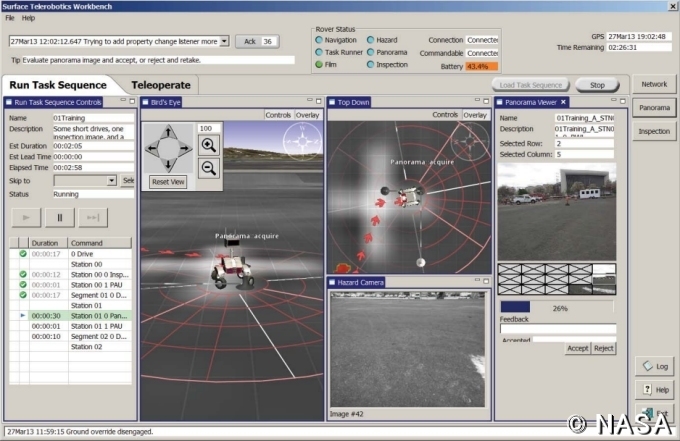
NASAが開発したVERVEの画面。いってみれば、半自動運転技術という感じで、行きたいところを指定すれば、そこへ安全にたどり着けるルートをAIが探しだし、障害がないかローバーが逐次自分で判断しつつ、その通りに移動するという仕組みだ。
SAMは事故現場など特別な状況下での通行に対応
SAMは、都市における走行で、自動運転車が事故現場など特殊な場所に遭遇したときに力を発揮するよう作られている。

事故や工事など、通常走行ができないイレギュラーな現場は、まだまだ現在のAIでは人と同等レベルに判断を下すのは難しい。
例えば交差点などで事故が発生し、片側の車線が事故車でふさがれてしまっているような状況を考えてみよう。その場合、片側が二車線以上あれば走行可能な車線を半分に割って対面交通を行い、交差点なども含めて警官による手信号で交通誘導が行われることだろう。
そうした緊急事態では、現状のAIでは正確な判断を下せない。自動運転車に搭載されているレーザーレーダー(対象物までの距離測定)やカメラ(物体や人の画像認識)などのセンサーは、事故が発生した場所(事故車両やパトカーなど)、信号機の色、警官による手信号の動きは認識できるようになってはきた。
しかし、事故発生現場のような特殊な状況下の交通の流れの中で正しい運転を行うためには、対向車を含めた周囲のほかのクルマ、歩行者や自転車の動きといった、全体的な交通の流れを理解した上で迅速かつ柔軟な判断が必要となり、現状ではそのレベルは人でしか行えない。
よって、自動運転車の最終形態である、ドライバーがいないレベル4の完全自動運転車を実現しようとした場合、そうした状況にも対応できる仕組みが必要だ。そこで考え出されたのが、人とAIを組み合わせたシステムであるSAMなのである。
SAMはどのように円滑に自動運転車を誘導するのか?

指令センターのモビリティ・マネージャーのイメージ。自動運転車がどう周囲をセンサーで把握しているかというメイン画面があって、ほかにカメラによる現場の映像などもある。
SAMは、自動運転車が事故現場に遭遇した場合、まずは安全に停車し、指令センターに通報する。
そして、指令センターにいる自動運転車の走行状況をセンサーから把握している専門スタッフ「モビリティ・マネージャー」が、通報してきた自動運転車に対して行動すべき正しい指示を送る。
例として挙げたような、事故の発生した交差点付近での正しい行動とは、警官の手信号に従い、信号機は無視するといったことだ。
次に、モビリティ・マネージャーは自動運転車が通行するためのルートを指示。自動運転車が指示された特別ルートで事故現場を抜けると、モビリティ・マネージャーは通常の自動運転機能を再スタートさせ、また別の事故現場の自動運転車から送られてくる支援依頼に備えるというわけだ。
→ 次ページ:
SAMは1台の自動運転車を設定すればあとは自動
SAMは1現場1回の対応だけであとは自動対応
自動運転車両のセンサー画面上では、モビリティ・マネージャーが事故現場を回避するための特別な走行ラインを指示。1度設定を行うと、自動的に同地域を走行中の自動運転車両に同じ指示が行き渡り、全車1台1台に対して同じ指示をしなくて済む作り。
モビリティ・マネージャーが1度対応すると、その事故などの起きた現場の位置座標と対処方法はクラウド内に蓄積され、その現場を通過する可能性のある、同地域を走行中のほかの自動運転車に通達が行われ、各自動運転車は迂回路を自分で設定するという仕組みだ。
これにより、モビリティ・マネージャーはその現場を通行・もしくは通行する可能性のある自動運転車すべてに対して、ひたすら同じ支援を繰り返すという必要がなくなるのである。
ちなみに、このモビリティ・マネジャーの必要な人数は、当該地域の交通渋滞の状況、クルマが提供するサービス形態(ロボットタクシーか、ロボットシャトルか、ロボット輸送車か、など)によっても変わってくるという。ただし、システム上に蓄積された過去の判断事例と自動運転技術が向上するのに伴って少なくなり、1人当たりが管理する台数を増やすこともできるようになるだろうとしている。
そして日産は、SAMは20年後の話ではなく、近い将来に実現する技術だとした。そして、SAMは人間をシステムから排除するわけではなく、人間と機械を融合させ、人間の知能を戦略的に活用することで、大規模な自動運転社会の実現を支援することを狙いとしているとした。
また、SAMは多くの車両を所有し、ビジネスで使用している配送業者、タクシー、輸送会社などにとっても有益なシステムとしている。
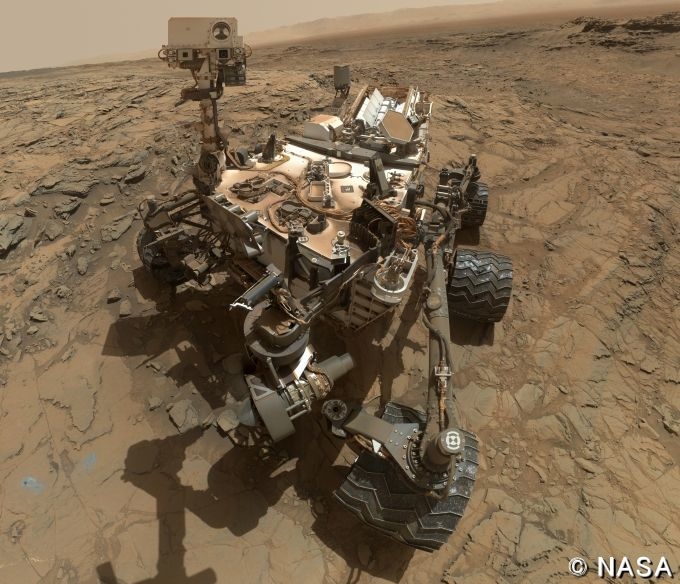
火星で探査中のキュリオシティ。火星で生命の痕跡を見つけられるか、奮闘中。そんな最先端の宇宙探査用技術が、日産によって民生用技術にフィードバックされることとなった。
2017年1月11日(JAFメディアワークス IT Media部 日高 保)
関連記事
●ホンダは「感情エンジンHANA」発表。Pepperの感情をクルマに応用。CESで楽しい未来モビリティを展開!
●自動運転NEXTでクルマが親友に! CESで発表のトヨタ「Concept-愛」、ドライバーとのフリー会話も
●AIが競い合う無人のF1!? 100チーム以上が参加希望する自動運転の爆走モータースポーツ「ロボレース」とは?
●【動画あり】自動運転技術が盛り沢山! 新型ベンツは自動車線変更も搭載
●日産の自動運転技術が新型「セレナ」に搭載された!