レーザーレーダーを「確率共鳴」で精度アップ
この記事をシェア
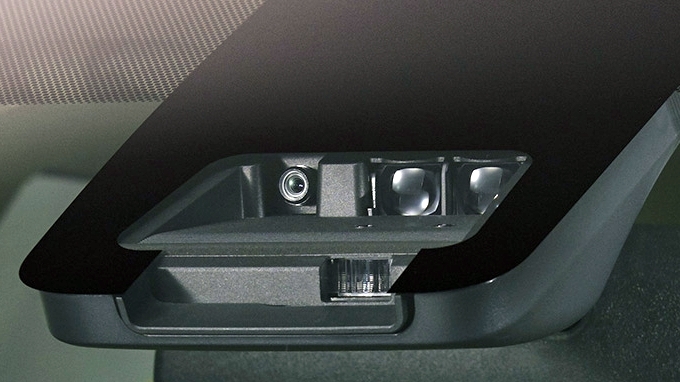
レーザーレーダーの一例。トヨタ「プレミオ」および「アリオン」に搭載されている「Toyota Safety Sense C」。単眼カメラとレーザーレーダーを組み合わせたユニットで、ルームミラーの裏側にセットされている。
ミリ波レーダーに比べると機器として安価で小型なことから、軽自動車やコンパクトカーなど、低価格帯の小型車にセンサーとして搭載されることが多い「(赤外線)レーザーレーダー」。
この「LIDAR」(ライダー:Light Detection And Ranging)とも呼ばれる装置は、レーザーを一定の範囲内で少しずつ角度を変えて水平に照射し、物体に当たって反射してきた光を測定。その反射に要する時間・光の強弱などで対象物までの距離、移動方向・速度などを把握することが可能だ。また、複数の光の反射を点群として計測して点を結びつけるクラスタの生成処理をすることで、その物体の形状も認識できるようになる。
しかしレーザーレーダーは、高級車のセンサーとして利用されることの多いミリ波レーダーと比較すると、遠距離でのクルマなどの認識力が低いという弱点がある(人の認識となるとまた話は別)。遠方になると、照射する1本1本のレーザーの間隔が開き、得られる点群の密度が低くなってしまうためだ。点群が少ないと正確なクラスタの生成処理を行えず、形状を認識できなくなってしまうのである。
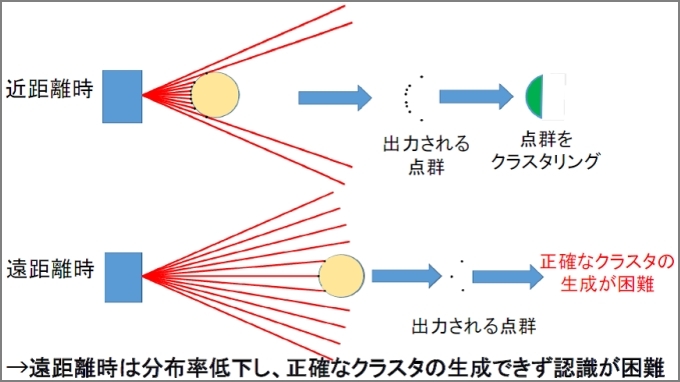
これまでのレーザーレーダーは対象物が遠くにあると、得られる点群が少ないため、どのような形状をしているか正確なクラスタリングをすることができなかった。
→ 次ページ:
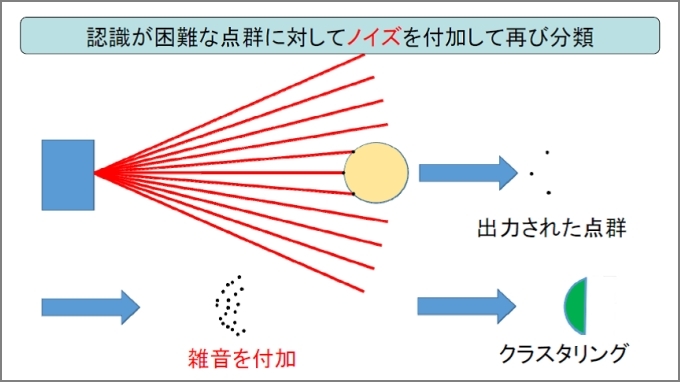
信号の精度を上げるのに必要なのはノイズだった!?
「確率共鳴」現象を用いればレーザーレーダーの性能アップ!
そうした中、芝浦工業大学システム理工学部機械制御システム学科の伊東敏夫教授は、「確率共鳴」現象を用いることで、レーザーレーダーの認識距離を伸ばすことに成功したことを7月3日に発表した。
この確率共鳴現象は、自然界において、外敵やエサ、水流などの動きを感知するためにザリガニなどが利用しているという。その仕組みは、信号には本来不要であるはずのノイズを適切な形にした上であえて加えると、ある確率の下では得られる信号が逆に強まり、より精度が上がるというものだ。
従来は遠距離になると得られる点の数が少なくなってクラスタリングが正確にできなかったが、そこに確率共鳴現象を利用して適切なノイズを加えると必要な点が増えるので、クラスタを生成でき、形状を把握できるのである。
実験結果と今後の展開
伊東教授は、この最適なノイズを発生させることにより、物体の識別距離を伸ばすことに成功。計測地点から20~80m以内の歩行者、バイク、クルマに対する実験を行ったところ、認識性能の改善が見られたとしている。この技術を採用すれば、レーザーレーダーによる認識性能を上げられるので、結果的に衝突被害軽減(自動)ブレーキの性能向上にもつながることになる。
さらに、この確率共鳴を利用する技術はレーザーレーダー専用というわけではなく、ミリ波レーダーやカメラを用いた画像認識技術にも応用可能だという。つまり、現在のクルマに搭載されているあらゆるセンサーの性能をアップさせる可能性を秘めているのである。
伊東教授は今後、同技術の実用化への第一歩として、自律移動型のパーソナルモビリティへの搭載を見据える。2020年度の完成を目指すという。
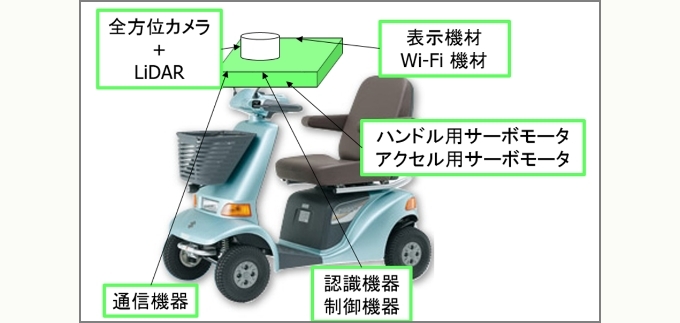
伊東教授が2020年の完成を目標として、複数の研究室との共同プロジェクトで開発中の自律移動モビリティ。市販のシニアカーをベースにしてさまざまな機器を追加して開発していく。センサーにはレーザーレーダー、全方位カメラなどを搭載する模様。