実際に遠隔で現場の自動走行ロボットをモニタリングしている様子。「ロボット管制」とは、航空交通管制という言葉にならい、NTT Comがそう呼んでいる。
ロボット管制という仕事には、まずは人材、そしてネット回線や複数のモニターに、複数のロボットを管理するシステムが必要だということが分かった。
複数のモニターが配置された環境は、誰しもが思い浮かべる管制室に近いイメージではないだろうか。
ゲーム用コントローラーでロボットを遠隔操作することもある。
左モニター画面は、ロボット(今回はデリロ)の現在の情報。①はGPSによる現在地。②は左右・後方カメラの映像。③は正面メインカメラの映像。④は歩行者用信号を認識している画面。⑤はテキストによるデリロの行動ログ。⑥はLiDARセンサーが検知している周辺の障害物。⑦は現在アクティブ状態となっている機能。
RMSの管理画面。①はロボットの管理メニュー。新規シナリオ追加の他、運行待ち、運行中、運行完了別に確認できる。②にはロボットの発着予定時刻と出発地および目的地が表示される。③にはロボットに関連する情報が表示される。④はロボットの進行予定ルートをマップで表示している。濃い色の丸印が現在地で、過去に通った軌跡は薄く表示されている。
NTTコム エンジニアリングでロボット管制業務に取り組む佐々木さん(写真左)と成田さん(写真右)。
都庁内で待機中のデリロ
無人宅配ロボDeliRo(デリロ)と、ロボット配達の実証実験を管轄しているNTT Comの田代さん。デリロにはRakuRo(ラクロ)という人を乗せられるモビリティと、PATORO(パトロ)という警備ロボの兄弟機が存在する。
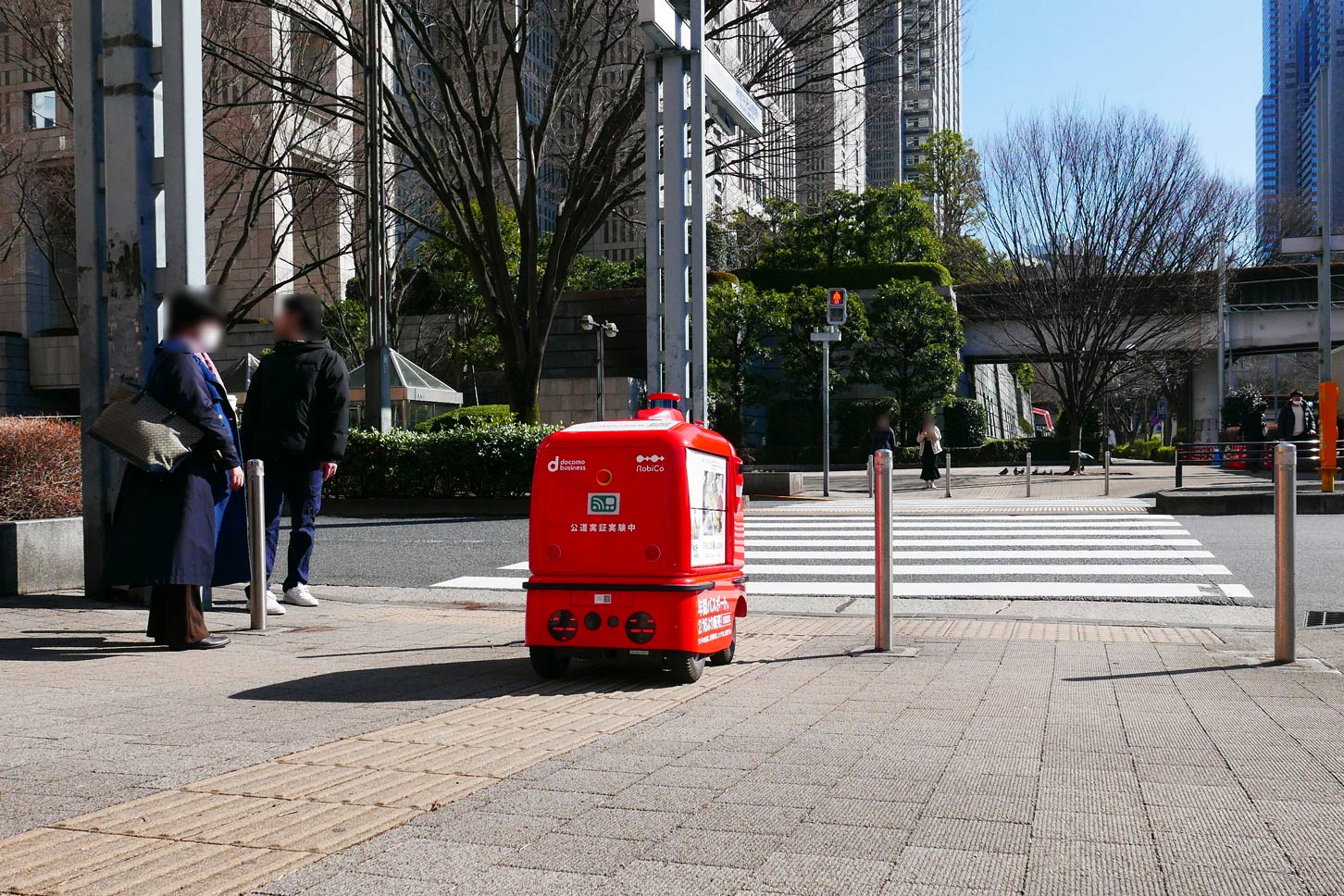
デリロは時速4kmを維持しながら、歩道の中央よりやや右側を優先して通るようあらかじめプログラミングされている。この写真の撮影の直後、前方の歩行者を検知して、左側に回避しながら前進していた。
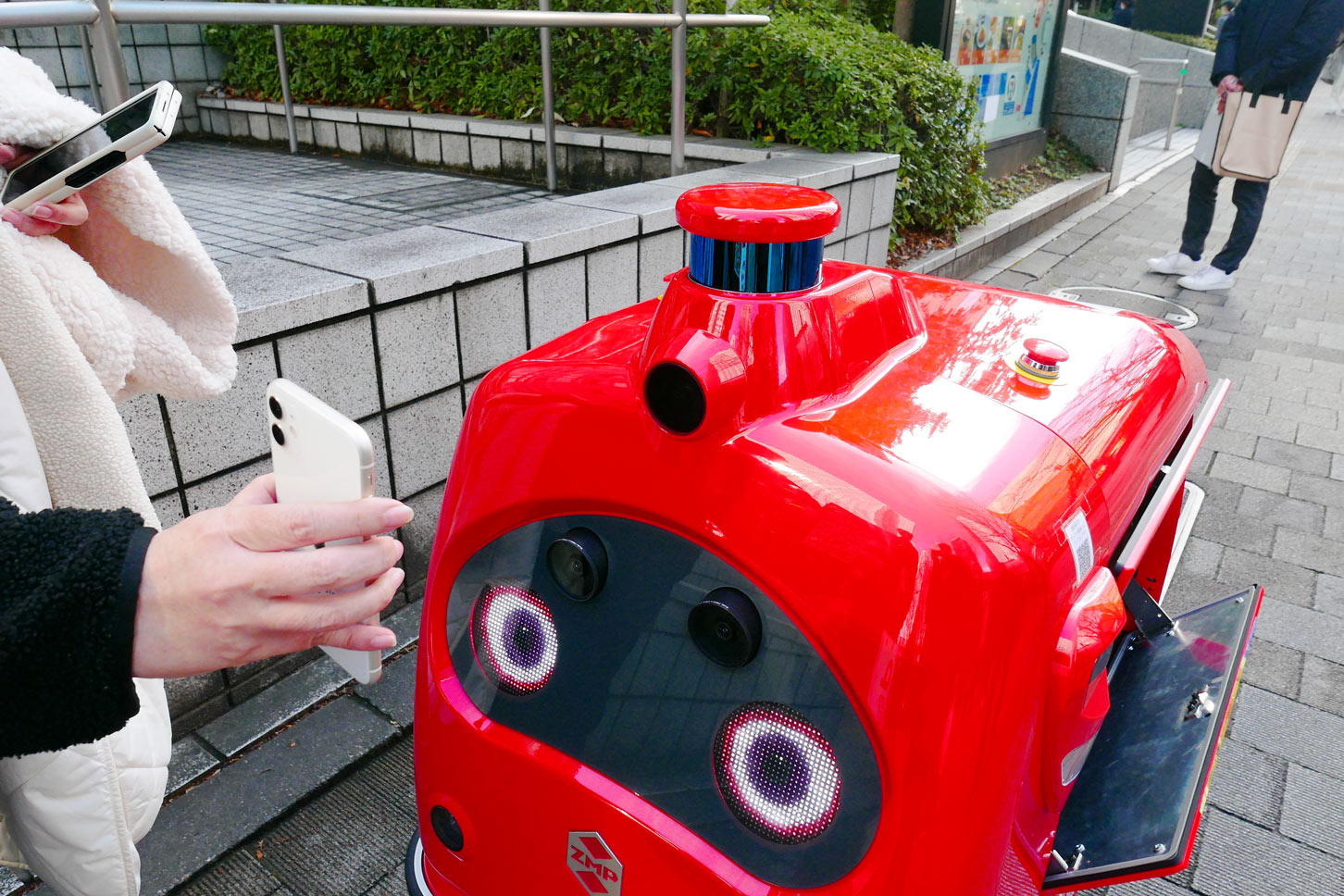
今回実証実験に採用されたデリロは、愛くるしい見た目のせいで、むしろ注目され過ぎているように感じた。しかし、ロボットデリバリーを周知するには印象値も重要であるため、難しい問題だ。
高架下などの明暗差が激しい場所や、狭い間隔でポールが設置されている場所でも、カメラとLiDARセンサーを駆使して、正確に前進するデリロ。ただし、電波が弱い場所があると、映像を管制室まで送信できなかったり、シグナルロストすることもある。映像データは容量が大きいので、自動運転において電波環境は死活問題になり得る。
周囲に人がいると、デリロが「ロボットが走行しています!」や「こんにちは!」という音声を発し、自身の存在を周知させていた。
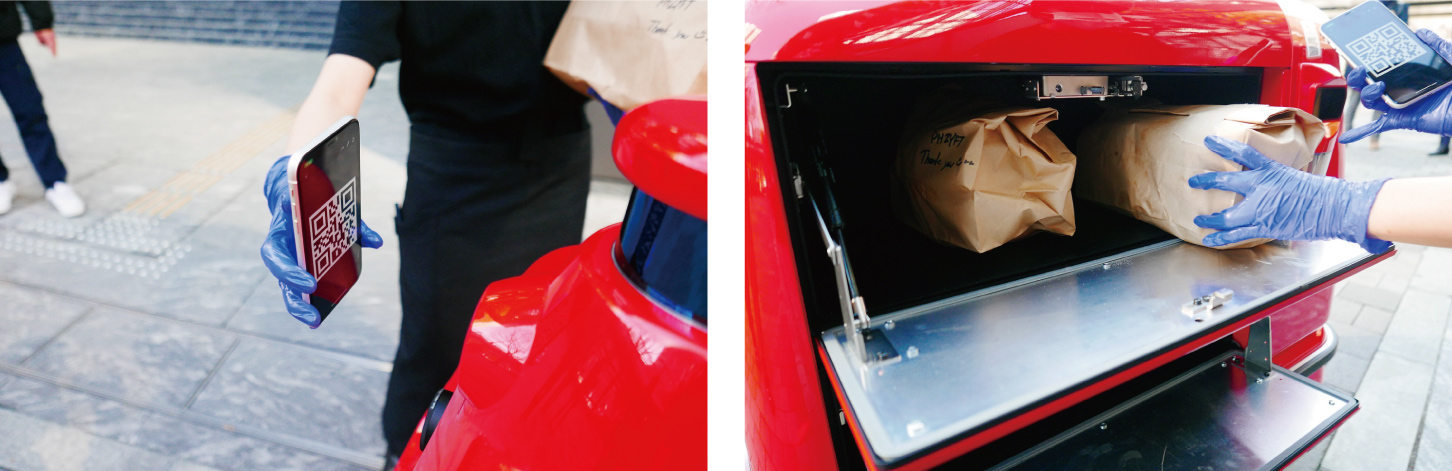
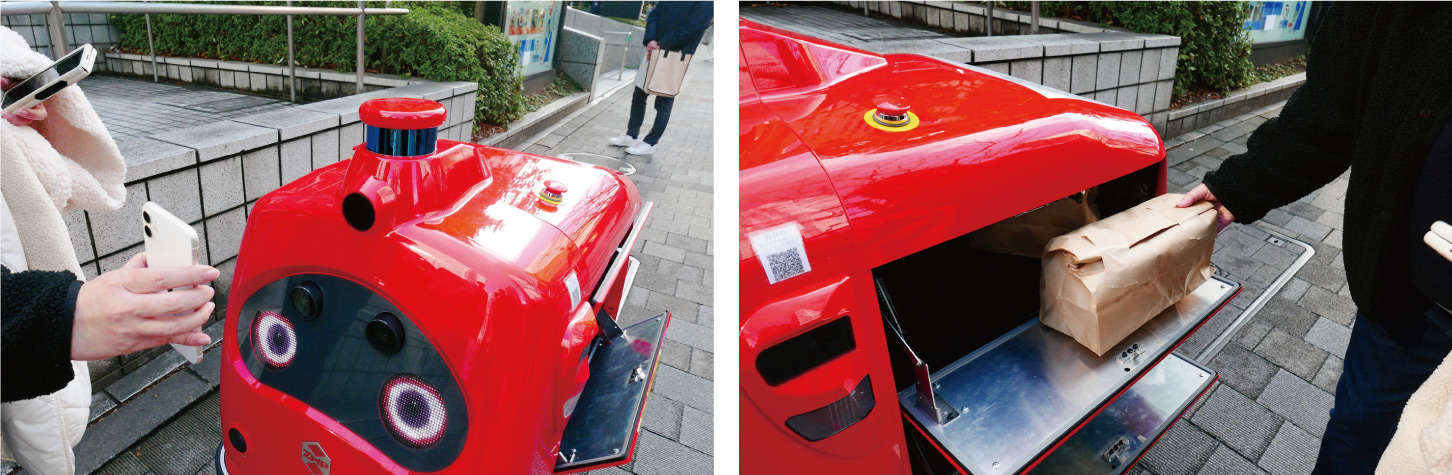
飲食店のスタッフが配達物を預けるシーン。専用アプリからQRコードをデリロに読み込ませることで認証し、収納部が解錠する仕組みだ。
こちらはフードメニューを注文した方が、実際に配達物を受け取っている様子。
緊急停止用のボタン。異変があれば、周囲の人が誰でもボタンを押して、ロボットを停止させることができる。
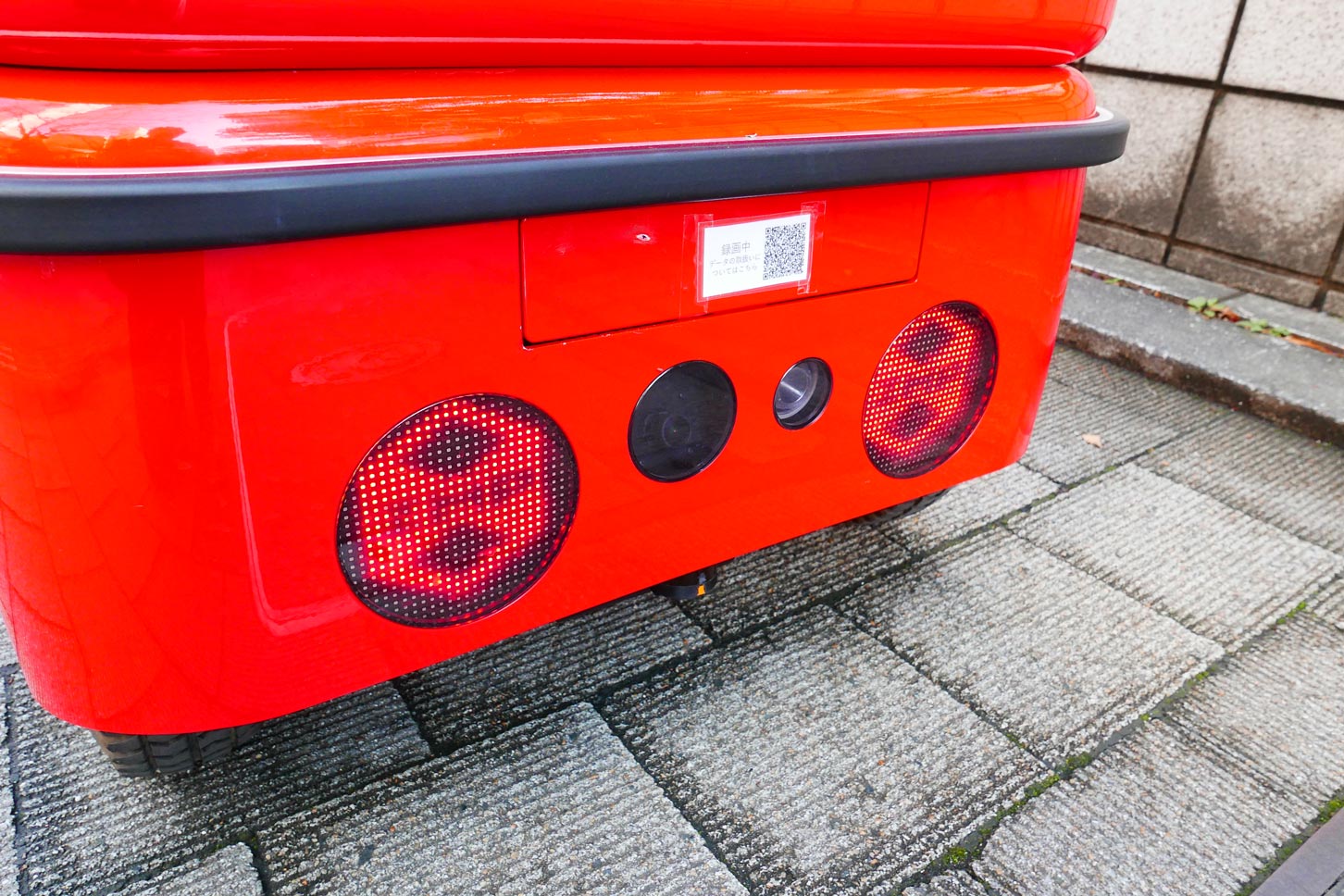
ブレーキランプには「ZMP」の文字が浮かび上がる。
横断歩道を渡る直前のデリロ。青信号はカメラで識別している。
ロボットでのデリバリーをマネタイズする場合、どうしても配達手数料だけでは割に合わなくなってしまうので、走行しながら宣伝できるよう、広告をデリロ本体に掲載しているという。






 応募はこちら!(6月30日まで)
応募はこちら!(6月30日まで) 応募はこちら!(6月30日まで)
応募はこちら!(6月30日まで)