ドラレコ画像で高速道路の路面チェックが可能か。実証実験へ。
NEXCO中日本は、2021年4月28日、ドライブレコーダーの映像をもとに高速道路の路面状況等の把握手段の有効性の技術実証を行うことを発表した。この実証実験は5月に行われる予定で、技術の実用化により業務の効率化を目指すためのもの。あわせてドローンによるのり面点検や道路敷地などの巡回の実証実験も行われる。
この記事をシェア
ドラレコとAIを活用した路面状況把握で業務効率化へ

ドライブレコーダーとAI技術を活用した「路面状況把握の効率化」実証実験イメージ 出典:NEXCO中日本
NEXCO中日本は、最先端のICT技術・ロボティクス技術のなどの導入により、高速道路を進化をさせるプロジェクト「i-MOVEMENT(アイ・ムーブメント)」を推進してきた。その一環として「イノベーション交流会」を2019年7月に設立。設立以来、すでに23件の技術実証を行い、そのうち3件が実用段階に移行中である。
今回、5月から着手と発表されたのが、「高速道路のモビリティマネジメントに関する技術」と「高速道路のインフラマネジメントに関する技術」。その内容を紹介しよう。
まず「高速道路のモビリティマネジメント」で行われるのは、ドライブレコーダーの加速度データと映像をもとに、AI画像解析技術を用いて高速道路の路面状態を解析するもの。具体的には、車線全体のポットホール、路面のひび割れ、橋梁継ぎ目の段差など、経年による路面変状を検知し、位置情報を取得して地図上に表示することで、路面状況の経年変化をグラフや画像によって可視化していく。実証実験の場所は、E1 東名高速道路が予定されている。

出典:日本電気株式会社
この実証実験で用いられるAI画像解析技術は、NECが提供する道路劣化診断サービス「くるみえ for Cities」。クラウド型のサービスで、パトロール車両などに搭載したドライブレコーダーが記録した路面の映像と、レコーダーに内蔵された加速度センサーの情報を、NECのデータセンターにモバイル通信でリアルタイムに送信する。それらの情報をAIで分析することで、映像からは路面のひび割れを、加速度情報からは路面の平坦性を評価し、異常や劣化の可能性がある箇所を地図上に表示する。
現状、目視点検を行っている道路パトロールにおいては、熟練した職員のスキルが必要であることや、点検が属人的なため客観的なデータが得られないなどの課題があり、今回の成果が期待されている。
ドローンの高性能カメラを活用した巡回業務の効率化を目指す
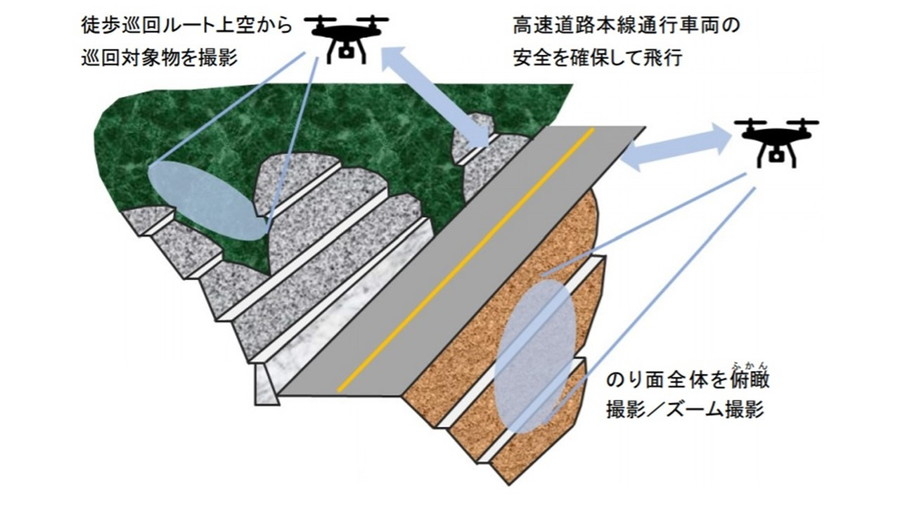
ドローンを活用した「のり面点検および徒歩による道路敷地などの巡回の効率化・高度化」実証実験イメージ 出典:NEXCO中日本
次に「高速道路のインフラマネジメント」の実証実験は、高速道路ののり面点検や道路敷地などの巡回に、カメラを搭載したドローンを活用する技術の検証だ。こちらも、現状は実走行による巡回時の目視で行われているが、現地踏査に時間を要することや危険を伴うなどの課題がある。ドローンによる巡回の有効性が実証されれば、のり面崩壊による土砂崩れなどの危険性をいち早く発見できる可能性がある。
ドローン撮影によるのり面点検は、NEXCO中日本管内の高速道路にて行われる。具体的には、徒歩巡回ルート上空から道路敷地などの巡回対象物を撮影するほか、のり面全体をドローンにて俯瞰・ズーム撮影していく。それにより、のり面の排水設備の損傷や、土砂流出の危険性の判定、倒木・不法投棄の早期発見を目指す。
高速道路の安全性を確保するためには、これまで熟練の職員の技術や、膨大な踏査時間が必要だったが、今後それらの効率化、迅速化が期待される。