池袋サンシャインシティで自動運転バスに試乗
国土交通省は12月13、14日に、自動運転バスを都市部に導入するための実証実験を、東京都池袋のサンシャインシティ周辺で行った。その自動運転バスに試乗した。車内や自動運転の様子を写真と動画でリポートする。
この記事をシェア
なぜサンシャインシティで実証実験?
今回の実証実験は、クルマも歩行者も多い池袋サンシャインシティ周囲の公道をフィールドに、自動運転バスの導入における都市部特有の課題や社会受容性などを検証することが目的とされている。
「都市部特有の課題」とは、多くの歩行者が横断歩道を渡っている交差点での左折や、路上に停車しているクルマがあるなどの状況のこと。このような状況下での自動運転バスの運用方法を検証するのが、実験の1つ目の狙い。
また「社会受容性」は、自動運転バスに対して、周囲の自動車や歩行者などの反応(受け入れ方)だ。自動運転バスに道を譲るのか、車間を空けるのか、などを観察する。これが2つ目の狙いとなっている。

サンシャインシティ前の交差点を自動運転で左折するバス。
それでは、サンシャインシティ周辺を、自動運転で走行するバスの様子を動画で見ていただこう。都市交通の中で、自動運転バスはどのようにふるまうのだろうか。
冒頭は首都高速・東池袋ランプ前の信号機。信号が青に変わってクルマが動き始める。先頭のはとバスではなく、そのあとに続くのが自動運転バス(正面が黄色と黒のツートン)である。自動運転バスは前方との車間距離を十分に空けてから発進している。
0:24あたりからはサンシャイン前の交差点のシーン。バスは自動運転でスムーズに左折しているが、左車線にいる白い普通車は自動運転に気付いているようで、バスと車間を取りながら左折している。
なお実証実験では、ドライバーが同乗した。最高速度は、20km/h以下であった。
首都高速・東池袋出入口付近と、サンシャインシティ前交差点の動画
周回コースと自動運転の範囲
実証実験で使用した自動運転バスは、国立群馬大学次世代モビリティ社会実装研究センターが所有するEVバスだ。同大学では、小型モビリティから路線バスまでと、さまざまな種類の自動運転車両を18台所有している。

国立群馬大学の自動運転EVバス。ルーフの前方にある黒い機器がレーザーセンサーと全方位カメラ。写真ではわかりにくいが、ルーフの後方にGNSS受信機(GPS電波を受信する機器)がある。2つのヘッドランプの間にも前方へのレーザーセンサーが装備されている。
乗車定員16人、全長500cm、全幅200cm、全高300cm、車両重量1590kg、車両総重量2470kg。
実験コースは、サンシャインシティ内のバスターミナルがスタート地点で、まずサンシャインシティ東南側の通りに左折で合流。そして豊島郵便局の交差点、東池袋中央公園の交差点、サンシャイン前の交差点、池袋保健所の交差点を左折するという周回コース。サンシャインシティ周囲を反時計回りに進むことになる。これを2周して、スタート地点のバスターミナルに戻る。
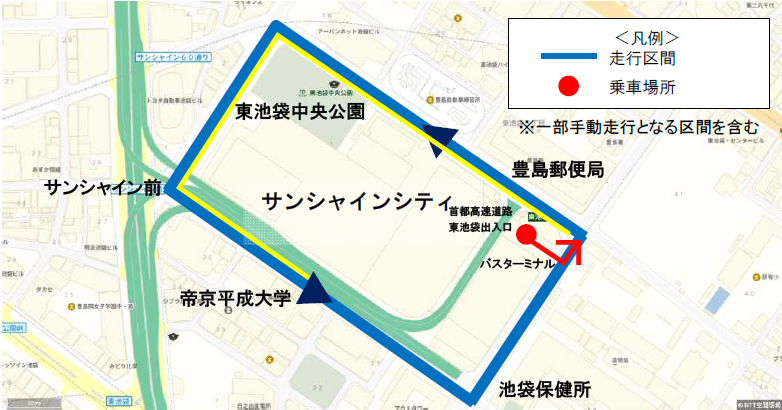
青が実証実験の周回コース(走行区間)。スタート地点のバスターミナルから左折で周回コースに入り、反時計回りに進む。走行区間内の内側に黄色の線があるところが自動運転の区間。出典:国土交通省リリースより
コース内で自動運転を行う場所は、豊島郵便局の交差点からサンシャイン前の交差点を過ぎた帝京平成大学あたりまで。このようにした理由は、GPS受信状況(GNSS受信機)によるものだ。
半屋内のバスターミナルはGPS電波を受信できないため、出発時はドライバーの手動運転による。一般道を走りだすと、およそ豊島郵便局の交差点あたりでGPSが受信状態となるため、その時点で自動運転に切り替える。
やがてサンシャイン前の交差点を過ぎると、頭上に首都高速が走るためGPSの受信状態が悪くなり、自動運転を解除する。2周目は、GPSの受信感度がよくなり次第、自動運転に切り替えて走行していた。
今回の自動運転システムはGPSと同時に、レーザーセンサーで周囲の建物などとの位置測定を行い、その情報を3D地図と照合して、バスの現在地を割り出す測位方法を用いている。それらによって実際の位置との測位誤差を数センチ単位に収めることができる。ただし、GPSを長時間受信できないと誤差も大きくなる可能性があるので、GPSの受信状況によって自動運転の範囲を限定したそうだ。

サンシャイン前の交差点を通過したバス。この少し先までが自動運転の範囲だ。頭上に首都高速の高架が見えるが、このような場所ではGPSの電波が届きにくくなる。
いざ、自動運転バスに試乗
実証実験に使われた自動運転バスは、条件を満たせばハンドルから手を放すハンズフリーも可能だが、今回の実験においては、運転操作の主体はあくまでドライバーとなる。自動運転中でも、ドライバーはハンドルをいつでも握れるような体勢をとらねばならず、普段運転するのと同じ体勢で着座していた。

GPSを受信して、豊島郵便局の交差点から自動運転を開始しようとしているドライバー。運転席には自動運転を操作するタッチパネルモニターが置かれている。モニターの右上には、GPS受信状況や3D地図の有無などといった各種ステータスを示すアイコンが、2列に並んでいる。上段のいちばん左がGPS受信状況を示す。緑は受信中、赤は受信していないことを表す。
自動運転プログラムには、走行する車線まで指定してあった。循環バスを想定した実証実験なので、片側2~3車線でも常に左車線を走行する。しかし豊島郵便局の交差点を過ぎたあたりや、サンシャイン前の交差点では、中央車線を走るようプログラムされていた。その2か所の左車線は首都高速や地下駐車場の入口への専用レーンになっているからだ。
また東池袋中央公園付近で、バス停に停まるというプログラムも盛り込まれていた。実際にバス停の看板が立てられていたわけではなく、3D地図内に書き込まれたバーチャルのバス停だったが、停車するたびに、停車位置の誤差を計測するなどの実験も行われた。
自動運転区間では交差点の左折は、自動運転でハンドル操作し、ドライバーが安全確認するという協業体制だった。豊島郵便局と東池袋中央の交差点では、横断歩道の前でバスが停止するようにプログラムが組まれていた。バスが停止するとドライバーは周囲の安全を確認して、タッチパネルモニターで自動運転の再開を指示。するとバスはゆっくりと左折を再開した。
サンシャイン前の交差点は歩車分離式信号のため、横断歩道の前で一時停止しないプログラムだった。

サンシャイン前の交差点を左折するバス。ルーフのレーザーセンサーで建物との距離を測り、3D地図に沿って、ハンドルが自動で切られていく。写真ではドライバーがハンドル操作をするように見えるが、不測の事態に備えてハンドルがすぐに握れるようにするため。自動運転は、モニター左上の赤の丸いアイコンをタッチするか、ブレーキを踏むと解除される。
臨機応変な車線変更が課題
コース内の左車線は、バンやトラックなどの貨物車が荷下ろしのために停まっていることもあった。今回は、そんな車両に対しては、自動運転バスは停まっているクルマの直後まで来て停車するようにプログラムされていたという。実際の交通シーンで臨機応変な車線変更を可能とするプログラムの開発も、今後の課題となっているそうだ。

路上に停まっているクルマがあると、自動運転バスは数メートルまで近づき停まる。ここで自動運転を解除して、ドライバーが車線変更を行う。
実証実験では体験できなかったが、一定条件下での車線変更を促すシステムの開発はすでに始まっているそうだ。例えば工事などのような、3D地図からの情報とは異なる臨時的な車線規制に対応するために、車線規制を知らせる発信機を施工区間に設置する。自動運転バスは発信機からの電波を受信して、車線変更を行うというものだ。
このように車体に搭載されているセンサーだけでなく、道路にある機器をIoT化してバスへ情報を送ることで、3D地図の情報にはない臨時的・突発的な道路状況の変更に対応して自動運転を継続する方法の研究も、群馬大学では進められている。
道路にある機器のIoT化としては、信号機が注目されている。自動運転バスは、カメラで信号機の色を認識してはいるが、その信号が何秒後に青へ変わるのかは認識できていない。さらに、時間帯によっては点滅式信号に変わる信号機であることも、自動運転バスは知らない。信号機からそうした情報を自動運転バスに発信してあげることで、安全性を高めていく研究も行われているという。
自動運転バスを降車して
混合交通下での実証実験は、十分な社会受容性を感じさせるものだった。今後の課題としては、歩行者が横断歩道を渡っている場合の左折と、臨機応変な車線変更の自動化だろう。
それらに関しては自動運転の技術進歩だけでなく、歩車分離式信号などといった道路のインフラの整備も大きな推進力となる。このような実証実験を繰り返すことで、自動運転技術だけでなく道路インフラの理想形も見えてくるだろう。