高精度3Dマップを制するものが自動運転を制する。トヨタが狙うものとは?
トヨタは2月28日、自動運転のソフトウェア開発を担うトヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD)と、高精度3Dマップ制作のスタートアップ企業であるCARMERA社の2社共同で、高精度地図の自動生成に向けた一般道での実証実験を行うことを発表した。
この記事をシェア

カメラで撮影した画像データを元に生成した対象物検出イメージ。
高精度3Dマップのカバー率は全世界で僅か1%未満
各メーカーがしのぎを削り開発を進める自律走行車。その成功の鍵を握る要諦と言われているのが、高精度の3Dマップだ。
自律走行車を確実に安全に走らせるためには、従来の2Dの地図情報に加えて、車線、標識、横断歩道、さらには縁石のありなしまで、周辺の環境を正確に把握した地図データが求められる。しかも刻々と変化する道路状況に合わせ、迅速に更新しなければならない点も従来の2Dマップとの大きな違いだ。単に3D化しただけではない、広範囲に及ぶ情報を付加した地図が「高精度3Dマップ」である。
いま世界中の自動車メーカーはもちろん、シリコンバレーのIT企業はこの高精度3Dマップの開発に躍起だ。もちろんこのビッグウェーブにトヨタだって黙ってはいない。自動運転のソフトウェア開発を担う「トヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD)」は今回、その分野で先行するアメリカのスタートアップ企業「CARMERA」と手を結んだ。
高精度3Dマップの作成は、現在、高速道路をメインに進められているが、TRI-AD社内の調査によれば、そのカバー率は全世界で僅か1%にも満たないのだという。
なぜそんなにまで少ないのかといえば、信頼性の高い自動運転向け地図の生成には、非常に高価なLiDAR(ライダー)と呼ばれるセンシング装置を載せた専用車両と、人手を使った地図生成プロセスが必要だからだ。(関連記事:自動運転の鍵を握る「ライダー」って何だ? ボルボが新しい自動運転技術を公開)
あのGoogleでさえ、高精度3Dマップの開発には苦戦している。この市場には、勝者不在というのが現状だ。正確には、レースはまだ始まったばかりというのが正しいのかもしれない。
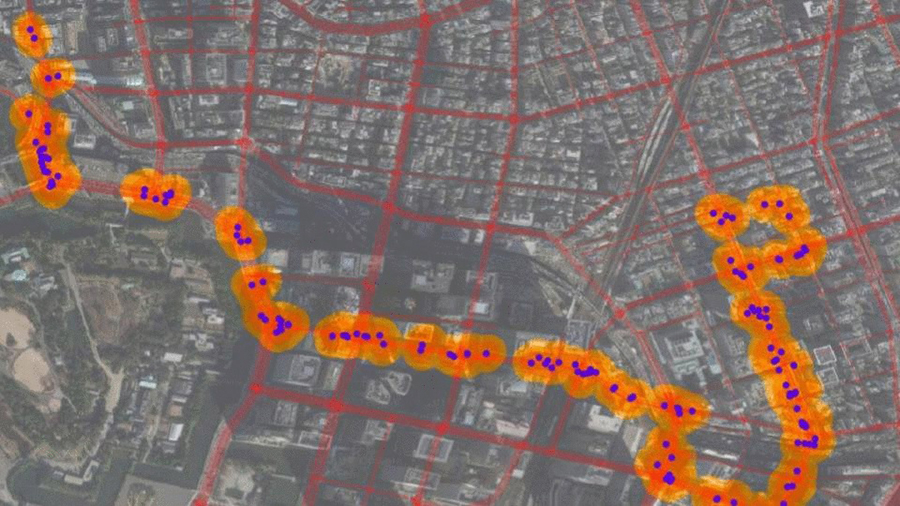
車両カメラの画像を元にした地図生成イメージ
トヨタの凄み
今回トヨタが立ち上げたプロジェクトは、膨大なコストと手間を大幅に削減し、開発スピードをさらに加速させようというもの。試験車に搭載するカメラは、トヨタの安全予防パッケージ「Toyota Safety Sense」のコンポーネントをそのまま流用し、そこから得た画像データを元にCARMERA社が提供するリアルタイムプラットフォームで自動処理。驚くほど手軽に高精度3Dマップが出来上がるという仕掛けだ。
トヨタは将来、世界中の市販車から取得したデータをもとに高精度の3D地図を自動生成し、あらゆる道路において自動運転を実現させようと考えている。つまり、大量に街中を走るトヨタ車が搭載する汎用型カメラやGPSを使ってネットワークを構築し、一気に高精度3Dマップを作り上げてしまおう、というトヨタ流の戦略なのである。同社のアドバンテージはやはりその圧倒的台数だ。高精度3Dマップは、道路状況の変化によって逐次更新が必要なため、走行台数の分母の大きさはさらにその凄みを増す。
もっとも同社は、この高精度3Dマップを独占する気はさらさらないようで「Automated Mapping Platform(AMP)」というオープン・ソフトウェア・プラットフォーム上で開発している。参加企業とデータを共有するという構想も進行中だ。
高精度3Dマップを制するものが自動運転を制する。今後の自動車業界の覇権を巡る争いは、今日も道の上で行われている。