トラックの隊列走行の実証実験。今度は上信越道で11月に、新東名高速では12月に実施
この記事をシェア

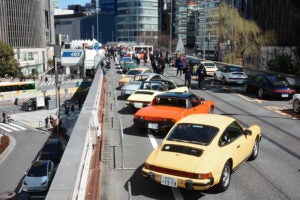
2018年1月に新東名高速の上り線浜松SA~遠州森町PAで行われた、後続車有人システム型のトラック隊列走行実証実験の様子。静岡県磐田市の新平山跨道橋から撮影された。いすゞ「ギガ」、三菱ふそう「スーパーグレート」、UDトラックス「クオン」の3台が隊列走行中。日野「プロフィア」はこのとき、隊列を離れて「クオン」と並走していたようだ。画像提供:トラック隊列走行事務局(豊田通商)
日本は現在、さまざまな業界において人材不足が大きな問題となっている。物流もそのひとつで、中でも長距離トラックのドライバー不足が問題だ。しかも、総務省が2015年に調査した「労働力調査」によれば、トラックドライバーの約4割が50歳以上という高齢化の問題も顕在化してきている。
国もそうした事態を認識しており、国土交通省および経済産業省が、複数台のトラックを電子的に連結して隊列走行を行えるようにするシステムの開発を進めている。長距離運転のドライバーの負荷を減らしたり、少ないドライバーで大量の物資を運べたりできるようにすることが目的だ。
2021年の商業化に向けて技術開発が進められているのが、隊列の2台目以降にもドライバーが乗る「後続車有人システム」だ。こちらは2台目以降のドライバーは運転の負荷を減らせるのはもちろんだが、最終目的地が異なるトラック同士でも途中までは隊列を組んでいけるというメリットがある。
そして、2022年の商業化を目標としているのが、2台目以降にドライバーが乗らない「後続車無人システム」だ。こちらはひとりのドライバーが複数台のトラックを運転できることに等しく、最終目的地が同じトラックならまとめてひとりで運転できることからドライバー不足を補えると考えられているのである。
2018年1月に新東名高速で後続車有人システムの初の実証実験
トラックの隊列走行は、「移動革命」を実現するための主要な取り組みのひとつとされている。そして後続車有人システム開発の一環として、2018年1月に新東名高速で初の公道実証実験が行われた。このときは、いすゞ「ギガ」、日野「プロフィア」、三菱ふそう「スーパーグレート」、UDトラックス「クオン」の国内4メーカーのトラックが1台ずつ参加し、合計4台での隊列走行が組まれた。
異なるメーカーの車両が隊列走行を行うことは世界初の試みで、それぞれのトラックの性能などが異なるために技術的に難しい。しかし、複数のメーカーで隊列を組めることには国内だけでなく海外でも大きな需要があることから、国内4大メーカーが協力して開発にかかわっている。そして1月末から2月にかけては、北関東道で高低差への対応などを確認するための第2の実証実験が実施された。
11月・12月には第3・第4の実証実験を実施

隊列走行中の日野「プロフィア」、UDトラックス「クオン」、三菱ふそう「スーパーグレート」。1月に新東名高速で行われた第1実験での様子。静岡県浜松市の浜松SA付近の跨道橋から撮影された。画像提供:トラック隊列走行事務局(豊田通商)
そしてそれらに続く後続有人システムとして、第3の実験が11月6日から上信越道で、第4の実験が12月4日から新東名高速で行われる。第3の実証実験は11月6日(火)から22日(木)まで、上信越道の藤岡JCTと更埴(こうしょく)JCT間の上下線で往復して行われる。第1・第2実験と同様に、4メーカーの4台の大型トラックが、CACC(※1)を用いて隊列走行を行う。CACCとは、従来のACC(※2)の仕組みに加え、車々間通信を用いることで後続車は先行車両の加減速に関する情報も得られるため、一定の車間距離をより緻密に保ち続けやすくなるというシステムだ。
第3の実験では走行距離が延長される。上信越道が選ばれた理由は、高低差があり、トンネルや半径のきついカーブがあるなど、多様な道路環境があるからだ。それらの環境でもきちんと車々間通信が働くのかが確かめられる予定である。また、実際に荷物を積んだ状態で走行する。トラックの全長は約12m、車間は約35m(距離は速度によって変わるため、車間時間1.6秒で設定)、先頭車両の先端から4台目の後端まではおよそ160mの長さとなる。
そして12月4日(火)から14日(金)まで行われる第4の実験では、新東名高速・浜松SAから遠州森町PA間の上下線を往復する(区間は第1実験と同じ)。今回は隊列の台数を2~4台と柔軟に変えて走る計画だ。2台隊列の場合の隊列長は約50m。4台隊列の場合は第3実験と同じで約160mとなる。この実験では、CACCによる走行に加え、LKA(※3)も利用する。LKAを導入することで、どれだけドライバーの長距離運転による負荷を減らせるかといったことなども、調査される予定だ。
※1 CACC(Cooperative Adaptive Cruise Control):協調型車間距離維持支援システム。ACCの仕組みに加え、さらに車々間通信(760MHz ITS通信)で先行車の制御情報を後続車が受信し、加減速を自動で行い、車間距離をより一定に保つ機能のこと。ACCよりも応答の遅れや車間距離の変動が少ない走行をすることが可能
※2 ACC(Adaptive Cruise Control):車間距離維持支援システム。自車に搭載されたカメラおよびミリ波レーダーなどの機器によって、前方の車両との距離を計測・算出して、車間距離を一定に保つ機能のこと
※3 LKA(Lane Keeping Assist):車線維持支援システム。白線を検知して車線内での走行を維持できるようステアリングを調整する機能
隊列走行実験中のトラックを見かけたら? 社会受容性も調査

実証実験に参加するトラックの外観イメージ。カーゴには実証実験の車両であることに加え、下部には側面と後方に緑のLEDライトが装備され、注意喚起を行う。画像提供:経済産業省/国土交通省/トラック隊列走行事務局(豊田通商)
トラックはカーゴ部分の側面に実証実験用の車両であることをペイントで注意喚起するとともに、緑のLEDライトもカーゴ下端に多数装備される。これは実験の一部であり、隊列走行を行うトラックであるということがどれだけ周囲から視認できるかということを調査するという。また公道で走行することで、社会的な受容性に関しても調査するとした。ちなみに、隊列走行を見かけたときは、アンケートに回答するとプレゼントがもらえる仕組みが後ほど用意される予定だ。
隊列の間に一般車が割って入ってしまったら?
実験走行中に隊列の間に一般車が入った場合、その時点でそこからの電子連結を切り離して安全性を確保するという。トラック同士の車間距離は速度によって変化するが、おおよそ35m。車間時間で1.6秒しかなく、CACCだからこそ安全を確保できる距離だ。間に割って入るということは、単純に前後のトラックとの車間時間は1秒未満となり、少々接近してしまうことになる。隊列走行を見かけた際は、その間に割って入ることは極力避けるようにしたい。
これまでの実験では、第1実験(新東名高速)の時は3車線ということもあってか、約15kmの距離で13回の実験走行中に合流・流出部で計2回の割り込みしかなかった。しかし、第2実験(北関東道)では2車線ということが影響してか、約50kmの距離での12回の走行中に、合流・流出部で20回の割り込みが発生したという。車間距離および合分流時の走行方法を検討する必要があるとしている。
また車線に関しては、片側3車線と2車線を比較すると、2車線区間では大型トラックなどが隊列を追い越す際に、多数のトラックなどが連なって走行する状況が発生したことが報告されている。そして隊列のドライバーによれば、3車線区間の方が運転しやすいという。3車線から2車線への車線数減少箇所では、一般車両と錯綜してしまうため、車線変更が難しいというコメントも出ている。
後続車無人システムは1月に新しい実験を行う予定
今回の実験は後続車有人システムだが、同時に後続車無人システムの開発も進められている。2018年6月にその走行の様子が報道公開され、現在は、次の実験として2019年1月に実証実験が予定されている。後続車有人システムの隊列走行よりも車間距離を短くする計画だ。