四脚双腕マシンがロボットみたいでカッコイイ!日本科学未来館「工事中!」
日本科学未来館(東京都江東区)で、油圧ショベルやブルトーザーなどの「はたらくクルマ」が大集合する企画展「『工事中!』~立ち入り禁止!?重機の現場~」が5月19日まで開催されている。見たこともないような重機やロボット技術に度肝を抜かれること請け合いだ。
この記事をシェア
まるでロボット!四脚クローラー方式双腕型コンセプトマシン
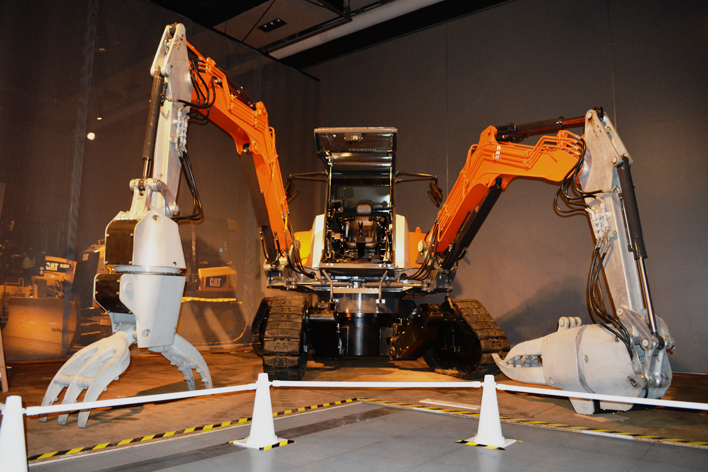
日立建機「四脚クローラ―方式双腕型コンセプトマシン」。2本の腕の迫力がすごく、SFに登場するロボットのようだ。解体現場で、解体しながら木材や鉄、コンクリートなどを効率よく分別することを目的として2本腕が採用された。

4つのクローラーで不安定な足場でもしっかりと地面をとらえることが可能である。通常の2脚クローラーでは、凸凹のある足場では作業できなかったため4脚が採用された。
同展に足を踏み入れると最初に迎えてくれるのは、日立建機の「四脚クローラー方式双腕型コンセプトマシン」。文字通り4つのクローラーがついた足と2本の腕が特徴の重機で、まるでSFに登場するロボットのようなカッコイイ佇まいだ。

日立建機「ASTACO(アスタコ)」は、通常の重機と同じく2脚のクローラーである。東京消防庁で採用されている。東日本大震災の復旧現場で、崩れた建物の鉄骨やコンクリートを片付ける際などに活躍した。(東京消防庁出初式にて撮影)

脚部は昇降可能で、伸ばした姿はほぼロボットのようだ。機動戦士ガンダムに登場する「ガンタンク」を彷彿とさせる。
同社が2005年に開発した双腕型の重機「ASTACO(アスタコ)」の後継機といえるモデルで、ASTACOでは2脚だったクローラーを4脚に変更し、不安定な足場でもしっかりと地面をとらえることができるようになった。例えば、地震で崩れた建物の破片などで路面が凸凹していても、4脚それぞれを昇降させることで、安定した姿勢で作業ができる。
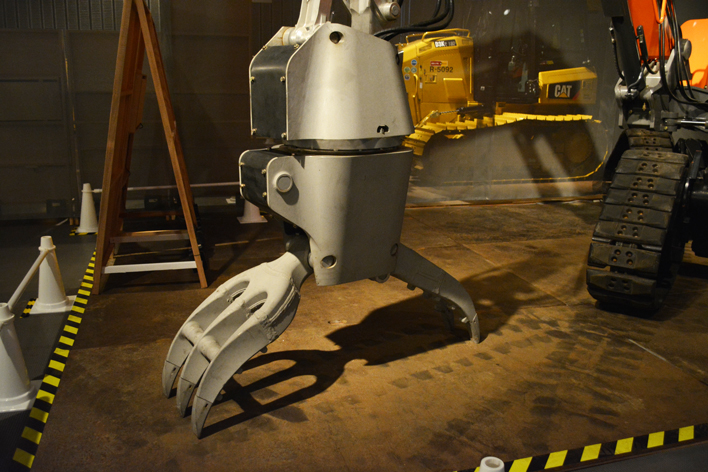
アルミ削り出しで軽量化を図ったという手の部分。別のアタッチメントを取り付けることもできる。
手の部分は、アタッチメントを取り換えることで「切る」「掴む」「掘る」などの作業が可能。またアームが2本あるので「切りながら掴む」「引っ張りながら切る」など、別々な動きを同時に実現できる。展示スペース内で流されていたデモンストレーション動画では、片手で虫取り網を掴み、もう一方でサッカーボールを掴んで網に入れるという繊細な作業もできることがアピールされていた。展示されたフォークを重ね合わせたような手は、アルミ削り出しで従来よりも大幅に軽量化されているという。それによってアームの操作性が向上。さらに、車両の重心が前方に偏る不安定さも軽減された。

操縦席を正面から見た様子。
同マシンの操縦席は、写真のようにフロントガラスの部分を跳ね上げて真正面から乗り込む仕様。まるでガンダムのコックピットのようである。真ん中のジョイスティックは移動する際に使用し、両サイドのレバーは左右の腕を操作する際に使用するそうだ。
狭い場所でも設置可能!ミニ・クローラ―クレーン。
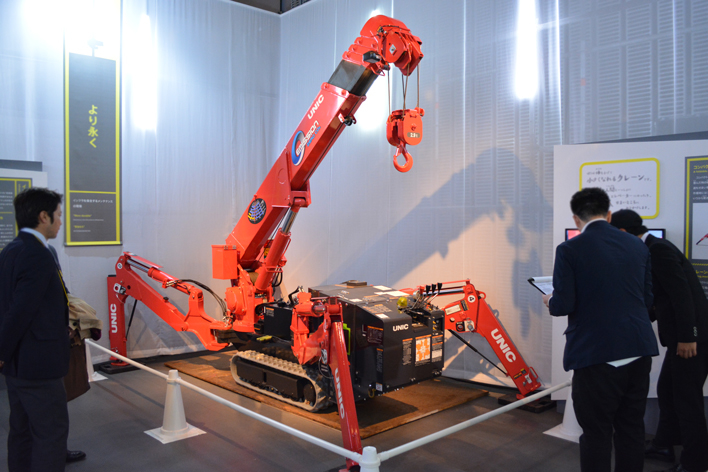
古河ユニックの「ミニ・クローラクレーン UR-W295CBR」。足の部分を折りたたんで移動する。
古河ユニックの「ミニ・クローラクレーン UR-W295CBR」は、サソリのような形をした移動式クレーン。足の部分を畳むと幅が69㎝とコンパクトになり、細い道や狭い場所に簡単に移動できることが特徴だ。エレベーターに積み込めるサイズなので、今まで重機の入り込むことのできなかった屋内で荷物を吊り上げることが可能だ。また、使用中はバッテリー駆動することができるので、排気ガスや騒音を出さない。小ぶりながらブームは最大で8.65mも伸びるので、建物の2~3階ほどの高さでも荷物を持ち上げることができる。

ジョイスティック式のコントローラー。直観的なコントロールを可能にした。
ブームの操作は、ジョイスティック式のコントローラーと選択スイッチ式のコントローラーから選ぶことができ、ラジコンのように簡単な操作で制御できる。
地下の配線や配管が見えるゴーグル?

大成ロテックの「地下の見える化システム」に使用されているゴーグル型ウェアラブル端末「HoloLens」。

ゴーグルすると工事現場の地下にどんな配管、配線が埋設されているか確認できる。
大成ロテックの「地下の見える化システム」は、ゴーグルをつけることで道路や建物の下のガス管や水道管、電話線といった埋設物を確認することのできるものだ。レーダー測定によって得られた地中データや設計図面を立体化することで配管や電線がまるで透けているかのように見ることができる。
例えば、地面を掘削する場合、従来の道路工事では、埋設物を傷つけないために、どこに何が埋まっているのか入念に確認する必要があった。しかしこのシステムを使用することで、その確認の時間を短縮することができるという。
遠隔操作で効率化

大成建設「T-iROBO Remote Viewer」。右の魚眼レンズとカメラを重機にセットし、ゴーグル状のヘッドマウントディスプレイでVR映像を見ながら操縦できる。

ヘッドマウントディスプレイに映し出される映像。写真では画面に映しているが、本来はゴーグル内で立体的に見ることができる。
大成建設の臨場型遠隔映像システム「T-iROBO Remote Viewer」は、重機に取り付けた2つの魚眼カメラで撮影した広範囲の映像を、作業員がつけるヘッドマウントディスプレイに映し出すことで、奥行きや距離感といった臨場感を感じながら作業できるシステム。従来の遠隔操作では、複数のカメラからの映像を複数のモニターで確認して操縦していたので距離感が掴みずらく操縦が難しく作業効率が悪かった。しかしこのシステムを使うことで、これまでよりも効率的に作業できるという。災害現場や事故現場など作業員が立ち入ることのできない場所での作業に活用されるという。
専用ロボットの活躍

大成建設と千葉工業大学が鉄筋結束作業のために開発した「T-iROBO Rebar」。
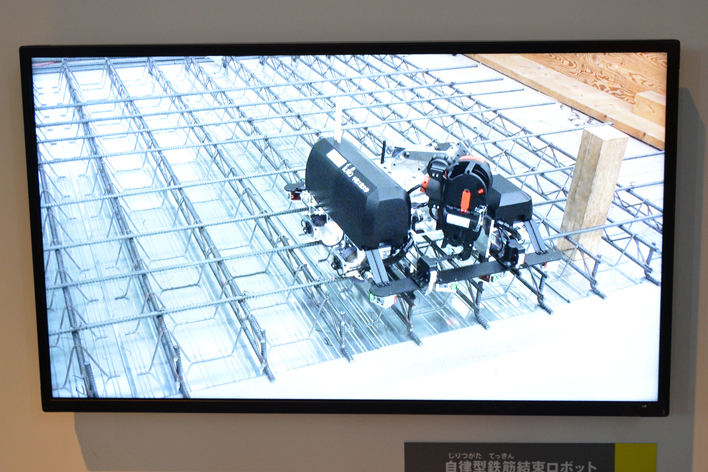
鉄筋の上で作業をする「T-iROBO Rebar」。鉄筋をレールにして移動する。
大成建設と千葉工業大学の開発した「T-iROBO Rebar」は、鉄筋を自動で結束する作業に特化したロボット。コンクリートの芯に鉄筋を配することで強度を高めた「鉄筋コンクリート」の工事のうち約20%程度の割合を占めるという鉄筋結束作業(交差する鉄筋を針金等で留める作業)の効率化が可能である。本体に搭載されたレーザーセンサーで鉄筋交差部と周辺の障害物を検知するという。
搬送用のロボット

トピー工業「クローラ―TO」。天板部分に荷物を載せて移動する。
トピー工業の「クローラ―TO」は、資材搬送に特化したロボット。スマートフォンからの操作で前後左右、全方向に移動することができる。独自開発した設置面積の大きいクローラーを使用しているので、デコボコな場所でも安定して資材を搬送することができる。これまで台車を使用していた搬送作業を効率化・省力化できる。
工事現場では、重機はもちろんのこと情報通信技術、ロボット技術などを取り入れて効率的かつ安全に作業が進められるような技術開発も進んでいるようだ。同展示に足を運んで見たことのない重機やロボットを体感してみてはいかがだろうか。