スズキ、月面ローバー開発中の「HAKUTO」とパートナーに
この記事をシェア
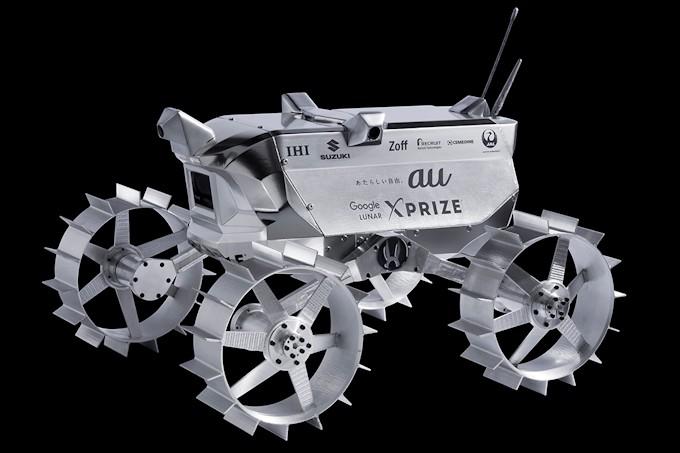
HAKUTOの探査ローバーのプリフライトモデル3。この後に実際に打ち上げるフライトモデルを製作
スズキは7月5日、ロボット月面探査レース「Google Lunar XPRIZE」に、日本から挑戦する株式会社ispaceが運営する民間月面調査チーム「HAKUTO」と、コーポレートパートナー契約を締結したことを発表した。
Google Lunar XPRIZEは、Googleがスポンサーを務め、XPRIZE財団によって運営されているロボット(探査ローバー)による月面探査の国際賞金レース。賞金総額は3000万ドルで、優勝チームにはその内の2000万ドルが与えられる。
2007年に同レースが発表され、そのときから参加チームは減ったが、現在でもHAKUTOのほか世界13か国から16のチームが参戦を目指して探査ローバーの開発を続けている。打ち上げは2017年の予定だ。
ミッションは以下の通り、3つある。
1.月面に純民間開発ロボット探査機を着陸させること
2.着陸地点から500m以上移動すること
3.高解像度の動画や静止画データを地球に送信すること
スズキはHAKUTOが開発する月面探査ローバーの技術支援を検討していくとしており、ミッションを成功させるには、以下の2点が大きなポイントとなるという。
1.打ち上げ費用に直結する探査ローバーの軽量化
2.「レゴリス」という、月独特のパウダー状の砂で覆われた月面を、スリップすることなく確実に走行できる走破性
スズキは、同社がこれまで小型車や四輪駆動車の開発で培ってきた軽量化技術やトラクション制御技術などの活用を検討しており、HAKUTOのミッションを支援していくとしている。
ちなみにHAKUTOは、同チームの探査ローバーが宇宙空間でも機能する性能を持つことを証明し、「モビリティサブシステム中間賞」を2015年1月に受賞。賞金50万ドルを獲得している。
2016年7月13日(JAFメディアワークス IT Media部 日高 保)