自動運転の「放水砲ロボット」など、「消防ロボットシステム」がお披露目!
消防庁は、今後発生が懸念されている南海トラフ巨大地震や首都直下地震のような災害を想定し、自動運転機能を備えた「消防ロボットシステム」の研究開発を進めている。もし、これらの災害が発生すると、災害区域内にある石油コンビナートなどで、消防隊員が近づけないほど大規模な火災が想定されるからだ。今回は、消防ロボットシステムについて紹介しよう。
この記事をシェア

「放水砲ロボット」の放水シーン。射程距離は70mほどだという。
三菱重工業は3月22日、「消防ロボットシステム」の実演公開を消防大学校(東京都調布市)で実施した。
消防ロボットシステムとは
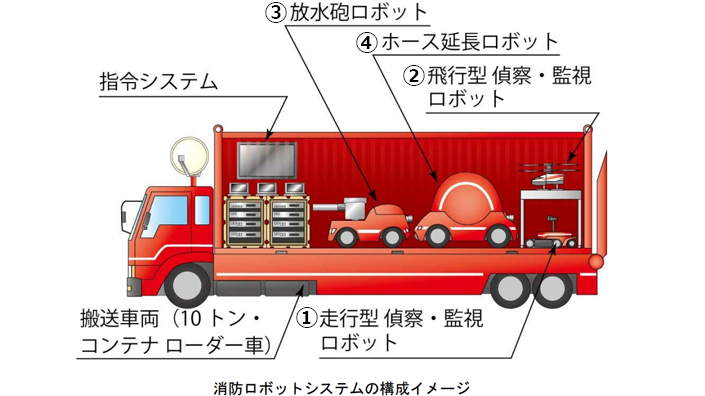
「消防ロボットシステム」は、1台の搬送車両に積み込むことができる。
「消防ロボットシステム」は、①飛行型偵察・監視ロボット、②走行型偵察・監視ロボット、③放水砲ロボット、④ホース延長ロボットの4機のロボットおよび指令システムを搭載した搬送車輌を備えた消防システムのこと。いわば「ロボット消防隊」である。
消防庁消防大学校消防研究センターが中心となり、「エネルギー・産業基盤災害対応のための消防ロボットシステムの研究開発」として、2014年から研究開発が進められてきた。このシステムの仕組みはこうだ。
ロボット消防隊出動!
消防ロボットシステムは、最少2人の消防隊員で運用することが可能。
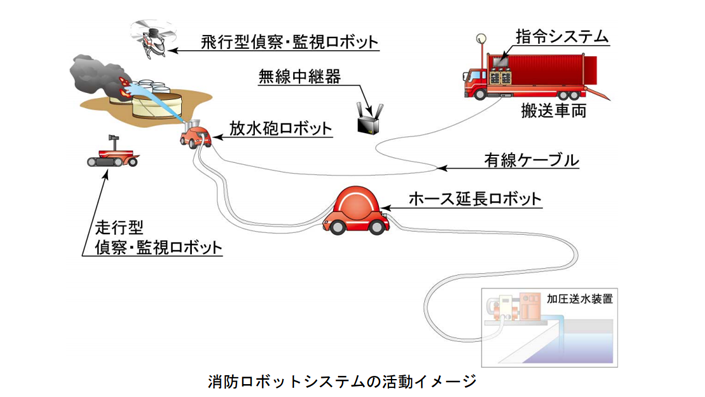
火災現場に到着すると、まず、飛行偵察型・監視ロボット(以下飛行ロボ)が上空から偵察を行う。搭載されたカメラやセンサーから、可視画像、熱画像、輻射熱量、可燃ガス濃度など、各種データを指令システムに発信し、システムが自動で火災発生場所を特定する。

左:飛行偵察型・監視ロボット。右:走行型偵察・監視ロボット。
飛行ロボからのデータに基づいて、走行型偵察・監視ロボット(走行ロボ)が火災発生場所までのルートを実際に走行する。こちらのロボットにも、各種カメラやセンサーが搭載されていて、収集したデータを指令システムに発信する。ちなみに、走行ロボはタイヤとクローラーを備え、瓦礫などが散乱している悪路でも走行可能だという。

放水砲ロボット。戦車のような外観がカッコイイ。ボディが銀色なのは、熱を反射して、耐熱効果を高めるため。
指令システムは、それらのデータを解析し、放水砲ロボット(放水ロボ)とホース延長ロボット(ホースロボ)の走行するルートを提案。それを消防隊員がチェックし、放水ロボとホースロボに出動指令を発信する。

ホース延長ロボット。消防用ホースが、リールに巻かれた状態で搭載されている。
その指令を受けて、放水ロボとホースロボの2機は、提案されたルートに沿って火災発生場所まで向かう。到着すると、放水ロボはその場にとどまり、ホースロボはホースを延ばしながらポンプ車や消火栓などの水源まで移動。消防隊員がホースとポンプを接続すると、放水が開始される。
耐熱性に優れたボディ

搬送車両のコンテナ内に設置された指令システム。
使用されるホースは、最長300mまで伸ばすことができるので、さまざまな火災現場に対応可能。放水ロボは、通常放水と泡放射を備え、1.0MPaの圧力で1分間に4000Lの水を放水可能。その射程距離は70mということだが、放水活動を行う2機のロボットは最大級のタンク火災に50mまで近接できる耐熱性があるそうなので、問題ないという。また、同2機は、農業用小型バギーを改造した専用車体で悪路走行性が高いそうだ。
同システムは、来年度から実証配備され、その効果を検証するという。消防隊員の安全を守り、効率的な消火活動を実現できる同システムに期待したい。