産総研による自動運転の実証実験第4弾、今度は日立市で

今回走行する、日野「ポンチョ」ベースの自動運転バス。先進モビリティが改造を行った。これだけさまざまなセンサーを搭載している。画像は産業技術総合研究所の広報資料より。
地方における過疎化が日本で進んでいる。それが公共交通にも波及し、人手不足や財政難から地域の路線の縮小や廃止などが行われており、大きな課題となっている。そして、それ故に認知症などのリスクを抱えていても生活のために運転せざるを得ない高齢ドライバーも多いといわれ、その結果、事故が起きるなど、こちらもまた社会的に大きな問題となっている。
これらを解決できる手段として大いに期待されているのが、「ラストマイルモビリティ」、「端末交通システム」などと呼ばれる、無人運転による移動サービスだ。
ラストマイルモビリティは運営コストの抑制、ドライバー不足の解消、高齢者が徒歩に頼らずに移動しやすくなるなど、メリットは非常に大きい。最寄り駅と最終目的地をラストマイルモビリティで結ぶことを2020年度に実現するという目標を、日本政府は掲げている。
そうした中、経済産業省と国土交通省から委託され、2017年12月から全国で自動運転の実証実験を行っているのが国立研究開発法人 産業技術総合研究所(産総研)だ。現在、市街地モデルとして石川県輪島市(17年12月開始)で、観光地モデルとして沖縄県北谷町(ちゃたんちょう、2018年2月開始)で、過疎地モデルとして福井県永平寺町(えいへいじちょう、2018年4月開始)の3か所で、ゴルフカートをベースとした4人乗りの小型自動運転車両「スマートEカート」で実証実験が行われている。
そして8月27日に第4弾として発表されたのが、茨城県日立市で行われる「ラストマイル自動走行の実証評価(日立市)」だ。今回はまずは10月19日から28日まで行われ、そのあとも内容を変えながら不定期に実証実験が続けられていく計画だ。
産総研が取りまとめる形で多くの企業が参加しており、今回は、SBドライブ、先進モビリティ、日本総合研究所、みちのりホールディングス、日立電鉄交通サービス、日本信号、コイト電工、愛知製鋼、NIPPOという9社に及ぶ。
→ 次ページ:
どんな自動運転の実験が行われる?
今回の実証実験の内容は?
自動運転バスは、日立市で日立電鉄交通サービスが運営している新交通「ひたちBRT」のバス専用路および一般道の合計約3.2kmを用いて行われる。具体的には、JR常磐線の大甕(おおみか)駅~おさかなセンター(道の駅)間。一部は手動運転区間も含まれるという。定員は、今回は安全性を考慮して全員が着座することにしたので8名までとなる。
BRTとはBus Rapid Transitの略で、バス高速輸送システムと訳される。バス専用路を利用して走ることが特徴で、ひたちBRTの場合は日立電鉄線の跡地(廃線敷)が利用されいる。ちなみに今回の実験では、ひたちBRTの運行の合間を縫って走ることになり、かなり商用運行に近い形となる。
今回の実験では、自動運転サービスを段階的に社会実装することなどにより、安全性や一般への受容性の向上と、自動運転サービスの早期実現を目指すとしている。
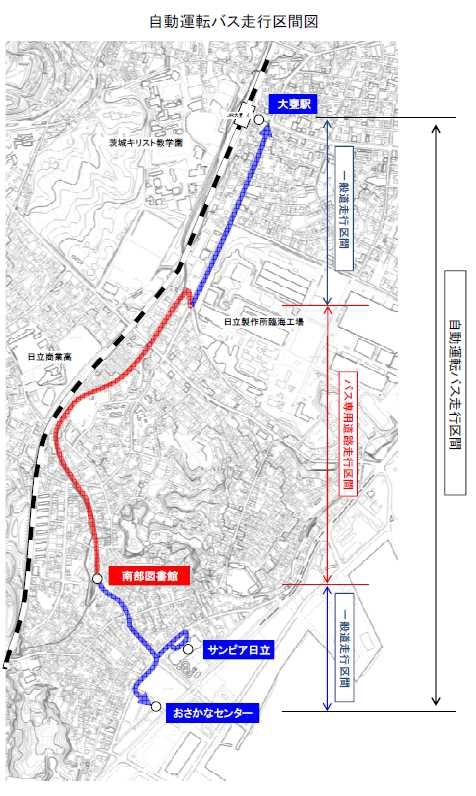
今回のルート。画像は産業技術総合研究所の広報資料より。赤いバス専用区間と青い一般道は、同じぐらいの割合。画像は、産業技術総合研究所の広報資料より。

ひたちBRTのバス専用路の様子。BRTはバス専用路であるため、鉄道に近い形で運用できる一方で、維持費は鉄道ほどかからないなどのメリットがある。ひたちBRTは、2005年に廃線となった日立電鉄線の線路跡地を利用している。画像は産業技術総合研究所の広報資料より。
→ 次ページ:
4種類の実験の内で唯一の小型バスタイプを用いた実験
今回はコミュニティバスモデルでの実験

自動運転化のため、数多くのセンサーが備えられている。前方向けにカメラ、LIDAR、ミリ波レーダー。側方にはLIDARと、後側方用のカメラ。後方用にはLIDAR。またGPS(GNSS/QZSS)用アンテナ、通信アンテナのほか、磁気マーカーセンサーも備える。ステアリング、アクセルおよびブレーキに加え、ウインカーも自動化されている。画像は産業技術総合研究所の広報資料より。
今回はこれまでの3種類の実証実験とは異なり、28名(内、座席は8名分)が乗車可能な小型バスを用いた、コミュニティバスモデルの実験となる。この自動運転バスは日野「ポンチョ」をベースに、先進モビリティが改造を施したものだ。
自動運転バスはGPSおよび磁気マーカー(車両の位置補正用)により、自動で走行ルートを維持する。走行速度は運用中のひたちBRTに準拠して、時速40km以内。また各種センサーにより障害物を認識し、自動的にブレーキも制御される。
自動運転バスの運行のため、ソフトバンク系列のSBドライブが開発した自動運転バス運行用遠隔管理システム「Dispatcher」が採用された。”発車係”という意味を持つ「Dispatcher」はバスの周辺状況だけでなく、車内で暴力行為などの犯罪が行われないよう、車内外のカメラを用いて運行状態を把握し、安全性を確保する。今回の実験では着座人数上限の8名を定員とするが、全員が着座しているかどうかをAIが判断し、立っている間は出発しないという。
そのほか、安全で効率的な運行のために試行されるのが、道路(インフラ)側の仕組み。まず、コース上の2か所の信号機には、磁気マーカーが埋設され、カメラも設置。自動運転バスが信号機の表示を確実に認識できるようになっている。さらに道路側のシステムとして、見通しの悪い区間では、横断歩行者の検知システムが設置される。道路側のセンサーから自動運転バスへ情報を送って、必要なら停止するというわけだ。
今回の自動運転バスは、技術的には運転自動化レベル4(※1)相当の性能を有するが、実際の運行は、ドライバーが運転席に着座して、ドライバーの責任で行うという。
ただし、バス専用路上では、不具合時などが生じた場合を除いて自動運転システムが主体となる、運転自動化レベル3(※2)相当での自動走行を行う。一般道区間でも、ドライバーの負担軽減を目指し、全てではないものの運転自動化レベル3相当での自動走行が予定されている。将来的には運転自動化レベル4での運行運行を目指す計画だ。
※1 自動運転技術のレベルを示す運転自動化レベルは、政府が「官民ITS構想・ロードマップ2018」でも採用したSAEの定義が一般的に使われている。SAEとは、モビリティの専門家が参加している米国の非営利団体「Society of Automotive Engineers International」のことで、同団体が2016年9月に発表した「J3016」の定義が用いられている。また、それを公益財団法人自動車技術会が翻訳したJASOテクニカルペーパ「自動車用運転自動化システムのレベル分類及び定義」も利用されている。SAE レベル4の定義は、「自動運転システムがすべての動的運転タスクおよび作動継続が困難な場合への応答を限定領域において実行自動運転システムがすべての運転タスクを限定領域内において実施し、作動継続が困難な場合、利用者が応答することは期待されていないもの」というもの。ちなみに限定領域とは、地理的な領域だけでなく、環境、交通状況、速度、時間的な条件なども含んでいる。現在、日本の公道では、道路占有などの規制がない状態ではレベル4の走行実験は認められていない。
※2 SAEレベル3の定義は、「自動運転システムがすべての運転タスクを限定領域内で実施するもので、作動継続が困難な場合にドライバーは、システムの介入要求などに対して、適切に応答することが期待されるもの」。
無賃乗車を防ぎつつ利便性もいい新しい決済システムを検討中
そのほかのトピックとしては、まだ詳細は決定していないということだが、商業化した際に重要となる決済システムも新たな方式を検討しているという。自動運転の公共交通システムの場合、無賃乗車されてしまうことを懸念する向きもあるため、決済システムは非常に重要だ。
また自動運転の公共交通は、導入された地域ごとにさまざまな形態が考えられる。地域住民が無料で利用できるよう、自治体がまとめて利用料を負担するといったケースも考えられるだろう。そうしたことから、決済システムも実用化に向けた重要な検討課題となっている。
今回の実験の責任者である産総研 情報・人間工学領域 端末交通システム研究ラボの加藤晋研究ラボ長によれば、SuicaやPASMOといった関東圏で広く利用されている電子マネー決済型の共通乗車カードはとりあえず考えていないとする。
アイディアのひとつとして検討されているのが、ネットで乗車予約をするとQRコードが発行され、それを乗車する際にかざすと乗れるというような仕組みだという。ただし高齢者が利用することを考えると、ほかの仕組みも必要と思われる。無賃乗車を防ぎつつ、利便性もいい仕組みを考えていくとしている。
一般の方が乗れる日程も用意
今回の実証実験を開始するに当たって、10月19日10時から、終点である道の駅・おさかなセンターにて出発式が開催される。この日はメディア向けに体験乗車などが行われる予定だが、一般向けの乗車日程も用意される。日程や申し込み方などは、日立市の公式サイト上で9月初旬に発表される予定だ。
→ 次ページ:
これまでの実証実験でわかってきたこと
これまでの3つの実証実験で見えてきたことは?

(左)3地域の実験で使用されている、ゴルフカートベースの小型自動運転車「スマートEカート」。(右)遠隔監視・操作システム。画像は産業技術総合研究所の広報資料より。
産総研としてはこれまで、小型自動運転車「スマートEカート」を用いて、3か所で実験を行ってきている。そこで、加藤研究ラボ長に実験で見えてきたことを聞いてみた。
まず「スマートEカート」に乗った地元住民や旅行者の反応について。過疎地モデルの福井県永平寺町での話だが、「スマートEカート」に乗車した感想として最も不安を感じていたのが、実は日常的に自分で運転しているい男性だったという。全体の1~2割ほどで、それも年齢が高い方ほど強くなる傾向だったそうだ。
技術的な問題なのか、心理的な問題なのかは今後もっと調査をすべき点としているが、おそらくは自分の運転の仕方と違うことからくる違和感が不安の要因となっているのではないか、ということだった。
また、あくまでもゴルフカートベースの新しいモビリティととらえられず、クルマとして認識してしまうと、乗り心地などの点で不満に感じる人も多いという。従来のクルマとして見られてしまうか、新たなモビリティとして見てもらえるかは、社会的に受け入れ方の観点から重要だろうとした。
逆に、助手席に乗っていることが多いと思われる女性は、”自動で動いてくれる井戸端”ともいうべき状態で、あまり不安に感じることはなかったようだという。友人同士で乗って楽しく会話しながら利用していたそうだ。普段から運転を任せていることが多い人は、あまり気にならないようである。
若者の反応は? また周囲の反応は?
そして沖縄県北谷町で観光地モデルとして行われている実験では、旅行者の若い世代にも多く利用してもらったという。すると、自分でクルマを所有していない人が割合として多くなるせいか、ここでも気にせずに楽しく利用している人が多かったそうだ。自分で運転しない人たちに自動運転は受け入れられやすいといわれるが、それを表しているのかも知れない。
最後に市街地モデルの石川県輪島市での反応。同市は独自の自動運転車の実験なども行っていることが知られている。加藤研究ラボ長が気になったのは、利用者よりも、周囲の反応だったという。「スマートEカート」は時速20km以下で走行するため、一般車の流れにはもちろん乗れない。横からどんどん追い抜かれていったことから、邪魔と感じられてしまっている可能性もあるとした。輪島商工会議所により、自動運転に2016年から取り組んでいる輪島市ですらそうだとしたら、新しいモビリティを普及させるには、きちんと社会的に認知してもらえるかどうかがとても重要だろうということだった。
ちなみに「スマートEカート」の最高速度が時速20km以下に設定されているのは、同速度を境に、車両に求められる安全性能が大きく変わることが大きい。時速20km以下での運転ならシートベルトの必要がなく、車両の骨格構造も従来のクルマに比べると衝突安全性の面でシンプルにできるので、開発・製造コストを抑えられるというメリットがある。現状の仕様では、専用レーンを設けた方がいいのかもしれない。
今後の計画は?
今後の実験では、このゴルフカートベースの小型自動運転車は4人しか乗れないことから、より乗車人数を増やしたモデルも計画しているという。自動運転バスに関しては、今後、立った乗客もいる状態での実験を検討しているそうだ。
ちなみに今回の日立市の実験も含め、実験は長期間にわたって連続的に行われているわけではない。このあとの計画として決定済みなのは、福井県永平寺町での実験。10月末から約1か月の長期にわたって再開される予定だ。